














 3 / 8
3 / 8

Метод ориентации летательных аппаратов в космическом пространстве…
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. Естественные науки. 2017. № 5
51
тельно излучения;
— угол между вектором
v
и направлением наблюдения,
1.
v c
Для оценки погрешности определения угла
d
возьмем производную
dT d
и выразим
:
d
2
2
0
1 cos
.
1 sin
dT d
T
Пусть погрешность определения температуры излучения
,
dT
как упомина-
лось ранее, составляет
7
10
K, скорость движения Солнца в направлении со-
звездия Льва —
370
v
км/с,
0
T
= 2,72548 K, а угол
= (0
; 360
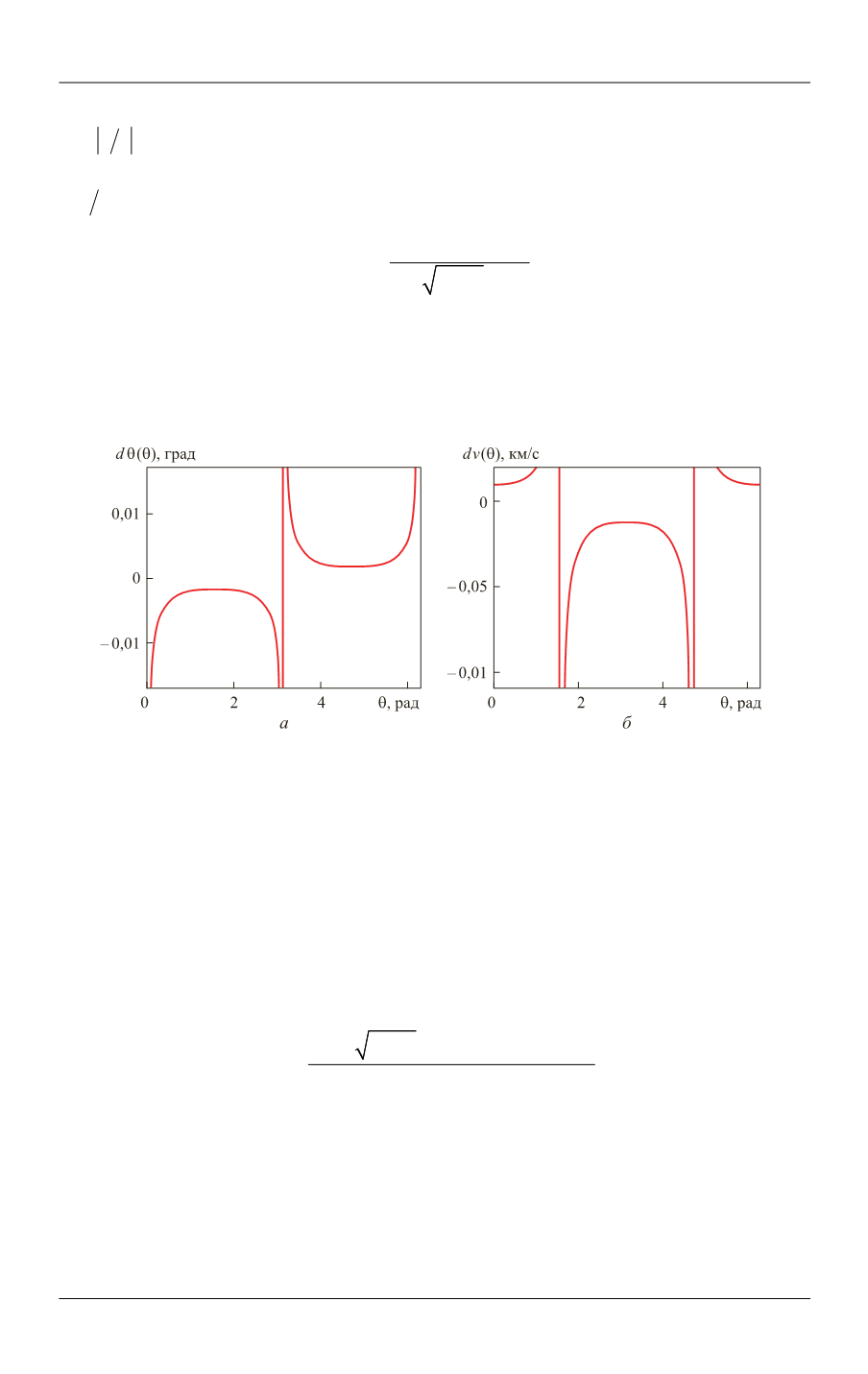
). Зависимость
( )
d
приведена на рис. 1,
а
.
Рис. 1.
Зависимости погрешности определения угловой координаты летательного
аппарата (
а
) и погрешности определения скорости летательного аппарата (
б
) от на-
правления измерителя спектральной плотности мощности
Минимальная погрешность определения углового положения вдоль одного
направления
min
d
=
5,8ʹʹ достигается, если
=
90
, 270
. В интервале
=
= (5,8…174,2)
˄
(185,8…354,2)
погрешность не превышает 10
d
min
.
Аналогичный расчет можно провести для определения погрешности вы-
числения скорости летательного аппарата, для этого возьмем производную
/
dT dv
и выразим
:
dv
2
2
2
0
1 1 cos
.
1 cos
1 cos
c
dT
dv
T
Зависимость
( )
dv
приведена на рис. 1,
б
.
Минимальная погрешность определения скорости
dv
min
= 0,011 км/c дости-
гается, если
= 0
, 180
, 360
. В интервале
= (0…84,38)
˄
(95,62…264,38)
˄
˄
(274,38…360)
погрешность не превышает 10
dv
min
.
Приведенные оценки в принципе свидетельствуют о том, что РИ может
быть использовано в качестве навигационного поля для решения задач ориен-