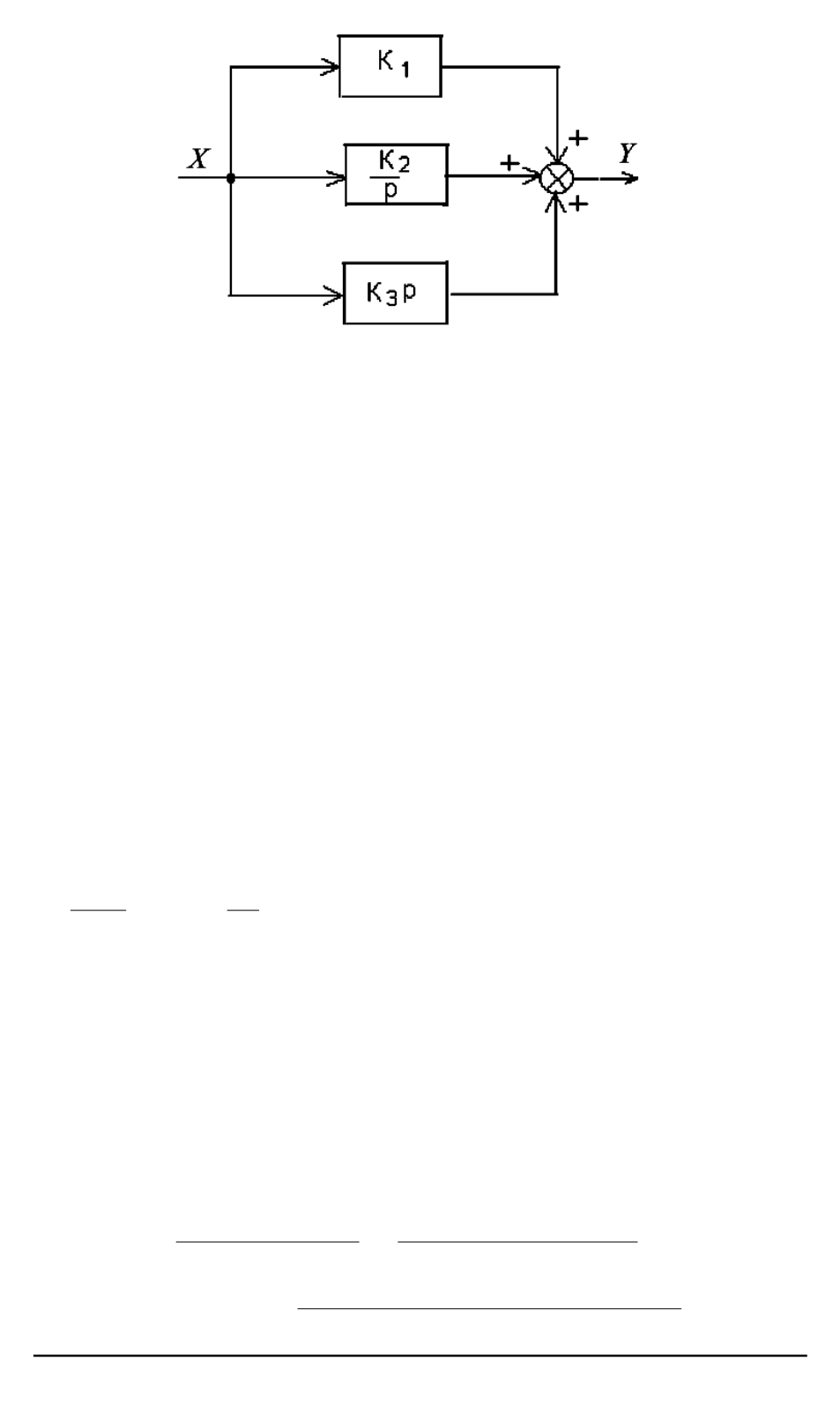
Рис. 1. Схема непрерывного ИПД регулятора
замкнутыми контурами. Но так как большинство объектов управле-
ния, как например электроприводы, имеет нелинейные характеристи-
ки с изменяющимися параметрами, возникает задача самонастройки
и самообучения ИПД регуляторов. Эту задачу легко можно решить с
использованием искусственных нейронных сетей, которые способны
к обучению, имеют высокую отказоустойчивость и вычислительную
мощность за счет параллельной работы отдельных нейронов [1].
Включение в контур управления электроприводами нейронных се-
тей приводит к замене обычных непрерывных регуляторов ИПД ней-
рорегуляторами; в данной статье приводятся результаты разработки и
исследования ИПД нейрорегулятора.
Рассмотрим непрерывный ИПД регулятор, схема которого приве-
дена на рис. 1
Передаточные функции непрерывного ИПД регулятора имеют вид
X
(
p
)
p
=
K
1
+
K
2
p
+
K
3
p, Y
(
p
)
p
=
x
(
p
)(
K
1
p
+
K
2
+
K
3
p
2
)
,
(1)
где
K
1
— коэффициент пропорциональной составляющей;
K
2
— коэф-
фициент интегральной составляющей;
K
3
— коэффициент дифферен-
циальной составляющей.
Для цифровых электроприводов, которые по своей природе — дис-
кретные и импульсные, ИПД регулятор необходимо представить в ви-
де разностного уравнения с использованием
z
-преобразования с уче-
том дискретности по времени:
Y
(
k
)
−
Y
(
k
−
1)
T
s
=
K
1
(
X
(
k
)
−
X
(
k
−
1))
T
s
=
=
K
2
X
(
k
) +
K
3
(
X
(
k
)
−
2
X
(
k
−
1) +
X
(
k
−
2))
T
2
s
,
(2)
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 3
57


