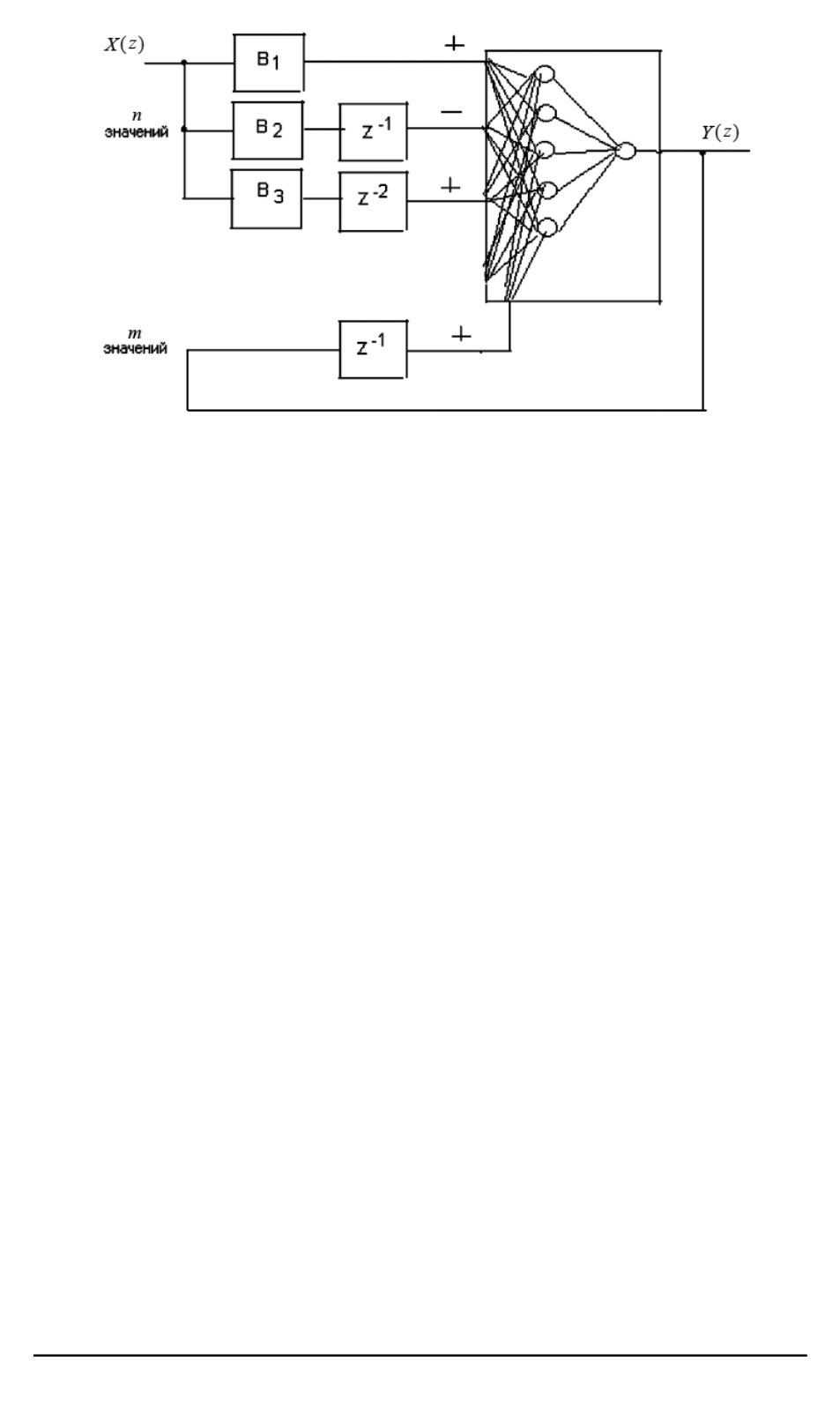
Рис. 4. Схема многослойной нейронной сети NEWFF
пространением ошибки, схема которой приведена на рис. 4. Элемент
z
осуществляет задержку сигнала на
j
шагов. На входы нейронной сети
подается
n
значений сигнала
X
(
z
)
и
m
значений сигнала с выхода
Y
(
z
)
. Величины
n
и
m
определяются порядком дифференциального
уравнения, которое описывает работу ИПД регулятора.
Нейронная сеть содержит в первом входном слое 5 нейронов с
функцией активации
tansig
и один нейрон на выходе с функцией ак-
тивации
pureline
.
На рис. 5 показана схема обучения нейронной сети, при котором
минимизируется ошибка предсказания
E
=
Y
1
−
Y
2
,
(4)
где
Y
1
— выходной сигнал дискретного ИПД регулятора;
Y
2
— выход-
ной сигнал нейронной сети.
Процедура обучения нейронной сети — нейрорегулятора заключа-
ется в настройке весовых коэффициентов и параметров нейронов. На-
стройка производится на основании информации о сигнале ошибки
E
между выходом дискретного ИПД регулятора и нейронной сети.
Нейронная сеть обучалась в течении 250 циклов, характеристика
точности обучения показана на рис. 6; установившаяся среднеквадра-
тичная ошибка составляет
24
,
34
.
На рис. 7 приведены графики переходных процессов при реакции
на ступенчатое входное воздействие дискретного ИПД регулятора и
обученного нейрорегулятора, из которых видно, что переходной про-
цесс дискретного ИПД регулятора хорошо совпадает с переходным
процессом нейрорегулятора.
Таким образом разработанный ИПД нейрорегулятор может исполь-
зоваться для интеллектуального управления электроприводами. ИПД
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 3
59


