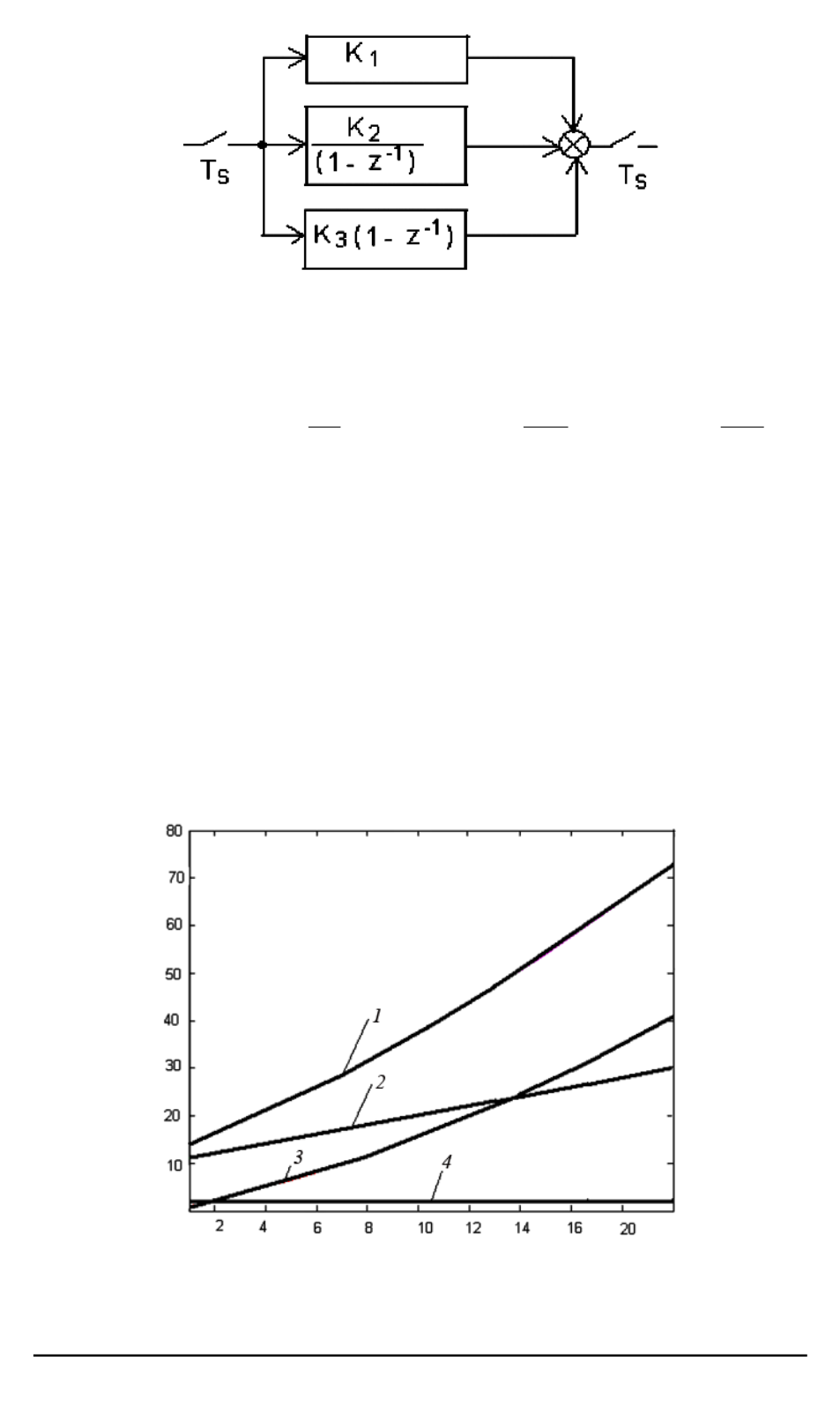
Рис. 2. Схема дискретного ИПД регулятора
Y
(
z
) =
Y
(
z
)
z
−
1
, X
(
z
) = (
B
1
−
B
2
z
−
1
+
B
3
z
−
2
)
,
(3)
где
B
1
=
K
1
+
K
2
T
s
+
K
3
T
s
;
B
2
=
K
1
+
2
K
3
T
s
T
s
;
B
3
=
K
3
T
−
2
s
.
Схема дискретного ИПД регулятора в
z
-преобразованном виде
приведена на рис. 2.
На рис. 3 приведены результаты цифрового моделирования дис-
кретного ИПД регулятора в системе MATLAB с использованием
управляющей программы IPD1, которая осуществляет ввод началь-
ных условий и данных, запуск на выполнение M-файла и вывод на
экран результатов в графической форме для случая линейного нара-
стающего сигнала.
Для разработки ИПД нейрорегулятора выберем многослойную
нейронную сеть NEWFF с прямой передачей сигнала и обратным рас-
Рис. 3. Результаты цифрового моделирования дискретного ИПД:
1
— график интегральной дифференциальной пропорциональной составляющей;
2
—
график пропорциональной составляющей;
3
— график интегральной составляющей;
4
— график дифференциальной составляющей
58
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 3


