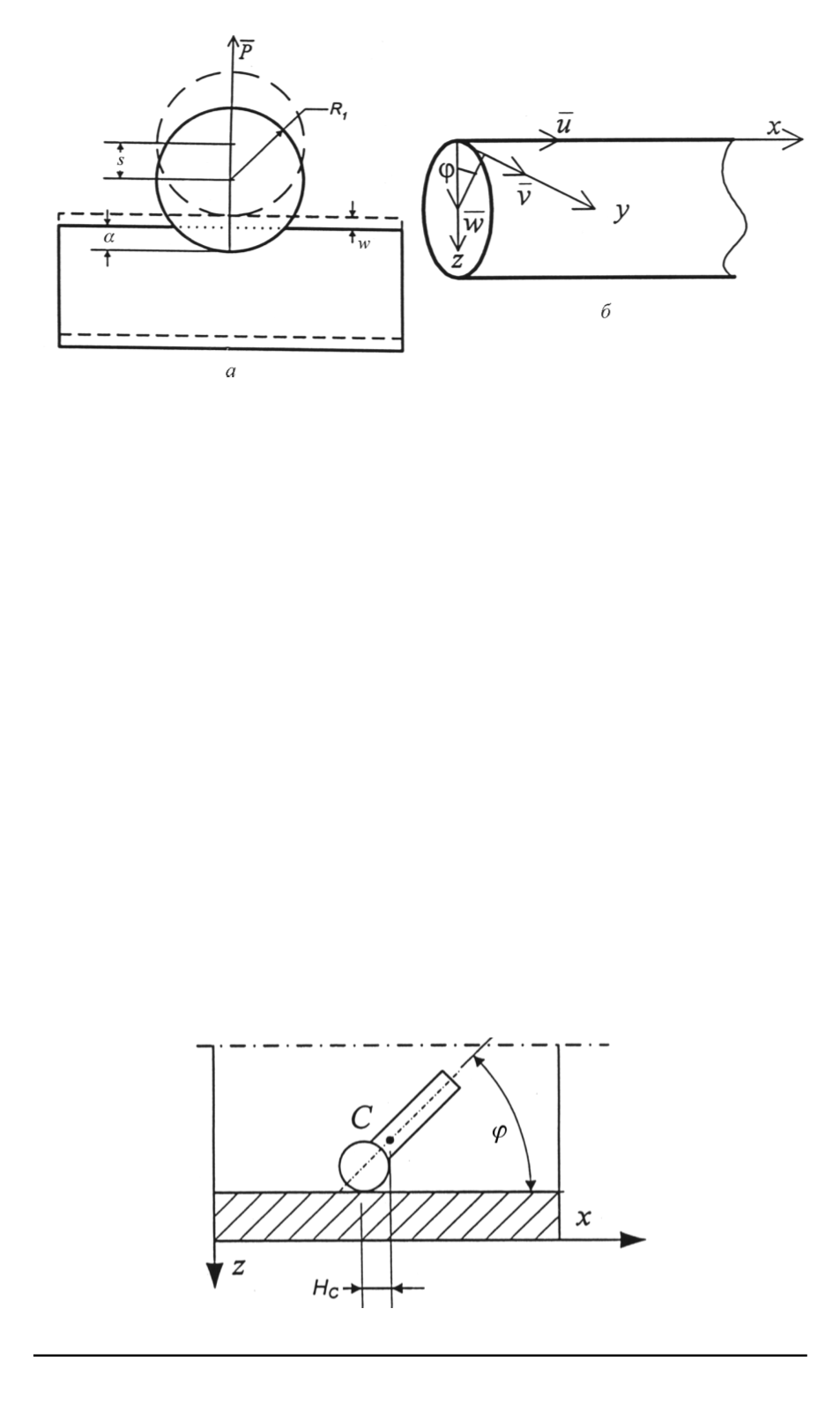
Рис. 1. Физические переменные задачи (
а
), система координат и компоненты
перемещения точек оболочки (
б
)
вид
M
¨
s
=
−
P
(
t
)
,
(1)
где
P
(
t
)
— нормальная сила взаимодействия твердого тела и оболочки
в месте контакта, которую требуется определить.
Координата
s
фиксирует движение точки по нормали к оболочке в
процессе удара (рис. 1,
а
). Начальные условия для движения тела при
ударе для момента
t
= 0
:
s
= 0
,
˙
s
=
V
0
. Уравнения плоского движения
твердого тела имеют вид (рис. 2)
M
¨
x
C
= 0
, M
¨
z
C
=
−
P
(
t
)
, J
¨
ϕ
=
−
P
(
t
)
H
C
,
(2)
с начальными условиями
t
= 0 :
x
C
=
x
C
0
, z
C
=
z
C
0
, ϕ
=
ϕ
0
,
˙
x
C
= ˙
x
C
0
,
˙
z
C
= ˙
z
C
0
,
˙
ϕ
= ˙
ϕ
0
.
(3)
Обозначим радиальное перемещение оболочки в точке, где произ-
водится удар, через
w
. Перемещение точки твердого тела
s
склады-
вается из радиального перемещения точки оболочки
w
и величины
Рис. 2. Схема расположения центра масс
100
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 3


