














 3 / 11
3 / 11

с заданной контактной жесткостью, сила реакции одного тела по от-
ношению к другому вычисляется как произведение гипотетического
взаимного проникания тел и контактной жесткости. Обычно полага-
ется, что чем ниже значение проникания, тем выше точность резуль-
татов, но хуже сходимость итерационного решения. Ограничение на
значение проникания выбирает пользователь программного комплек-
са, который делает этот выбор методом проб и ошибок на основании
имеющегося у него опыта. В статье также рассмотрено влияние при-
бавления нагрузки.
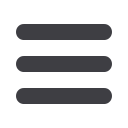
Постановка задачи.
Рассмотрим два контактирующих тела
N
,
O
объемами
V
N
,
V
O
и размерами 22,5
×
22,5
×
15 мкм, ограниченные не-
подвижными поверхностями
S
N
и
S
O
. Высота тел 15 мкм выбрана на
основе предварительных вычислений так, чтобы на верхней и нижней
поверхностях перемещения были распределены достаточно равномер-
но. Тела имеют гладкие внешние поверхности и неидеальный контакт
неровных поверхностей между собой (рис. 1,
а
). Обозначим через
S
N
1
,
S
N
2
,
S
N
3
,
S
N
4
части поверхности
S
N
=
S
N
1
∪
S
N
2
∪
S
N
3
∪
S
N
4
, и
S
O
1
,
S
O
2
,
S
O
3
,
S
O
4
части поверхности
S
O
=
S
O
1
∪
S
O
2
∪
S
O
3
∪
S
O
4
.
На поверхность
S
N
1
тела
N
действует внешнее давление
р
= 8
МПа.
Поверхность
S
O
1
закреплена от перемещений по оси
z
, а поверхно-
сти
S
N
2
и
S
O
2
— от перемещений в ортогональных им направлениях.
Трением пренебрегаем.
Рис. 1. Геометрическая схема (
а
) и модель (
б
) контакта шероховатых тел
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2016. № 1
113