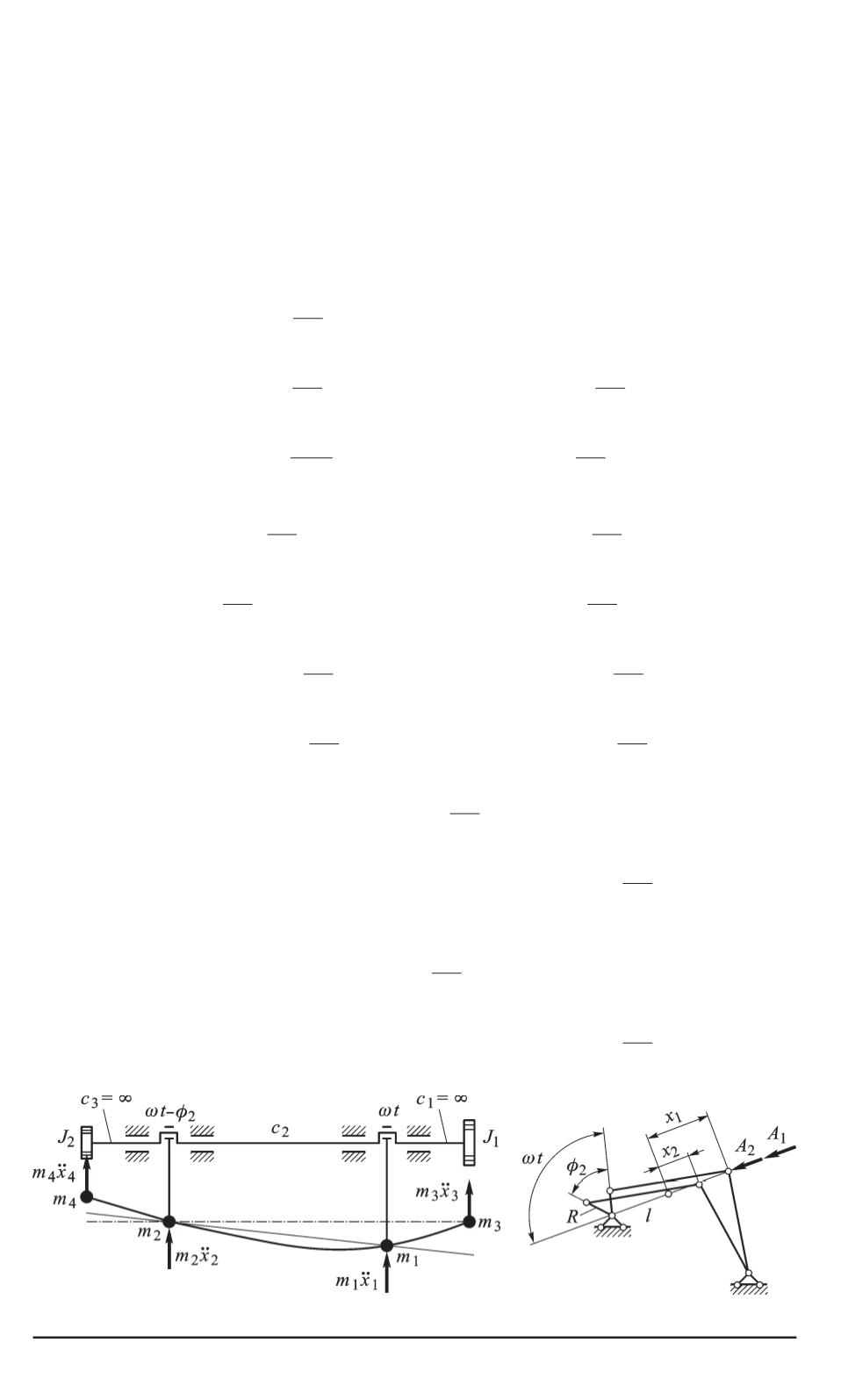
Расчетная схема механизма составлена с учетом упругости наибо-
лее податливых звеньев: кручения коленчатого вала между кривоши-
пами и изгиба бруса между лопастями — и представл яет шестимассо-
вую систему с тремя степенями свободы (рис. 1). Полученная система
уравнений описывает установившийся и неустановившийся режимы
движения батанного механизма ткацких станков типа АТ и относит-
ся к системам с периодически изменяющимися параметрами (вывод
уравнений приведен в работе [5]):
1 +
A R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
)
2
¨
φ
2
+
+ 2
Aω
(
R
cos (
ωt
))
−
R
2
l
cos (2
ωt
)
R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
) ˙
φ
2
+
+
⎡
⎢⎢⎢⎣
B
−
Aω
2
R
sin (
ωt
)
−
2
R
2
l
sin (2
ωt
)
R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
) +
+
D R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
) +
E R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
)
⎤
⎥⎥⎥⎦
φ
2
+
+
F R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
)
x
4
−
G R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
)
x
3
=
=
H R
(1
−
cos (
ωt
))
−
R
2
2
l
sin
2
(2
ωt
)
R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
) +
+
Aω
2
R
cos (
ωt
)
−
R
2
l
cos (2
ωt
)
R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
) ;
(1)
¨
x
3
+
Kx
3
−
Mx
4
−
N R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
)
φ
2
=
=
P R
(1
−
cos (
ωt
))
−
R
2
2
l
sin (2
ωt
) ;
¨
x
4
+
Qx
4
−
Sx
3
+
T R
sin (
ωt
)
−
R
2
2
l
sin (2
ωt
)
φ
2
=
=
W R
(1
−
cos (
ωt
))
−
R
2
2
l
sin (2
ωt
)
.
Рис. 1. Расчетная схема батанного механизма
60
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2010. № 2


