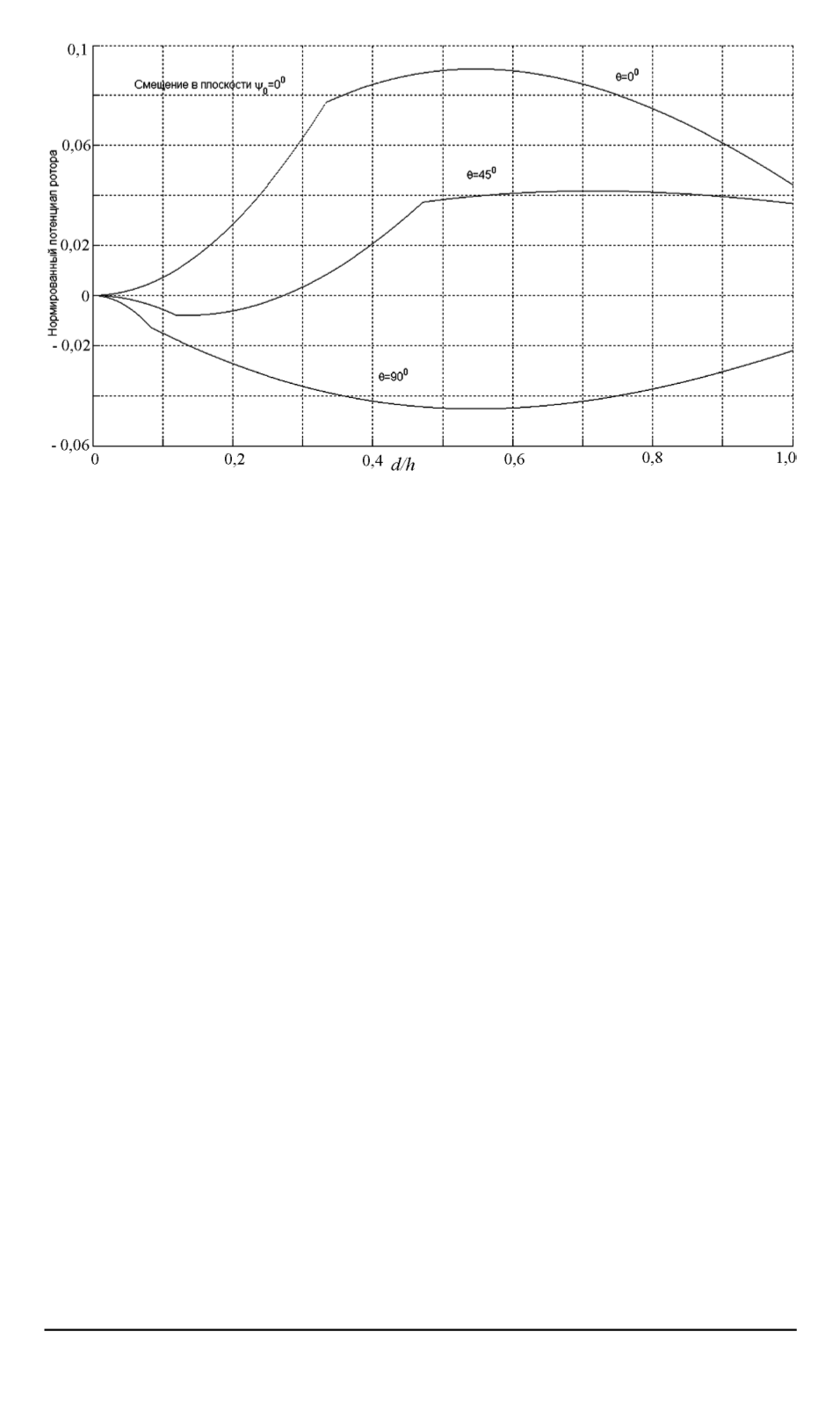
Рис. 3. Нормированный потенциал ротора подвеса с сегментными электродами
при первом варианте управления
в направлении электрода Э1 (см. рис. 1). Этому случаю соответствуют
углы
ψ
0
= 0
◦
и
θ
0
= 0
◦
. При смещении в линейной зоне (
d/h
6
0
,
1
)
нормированный потенциал для любого направления смещения не пре-
вышает
0
,
02
.
Отметим, что при рассмотренном законе управления подвес будет
неравножестким. Это следует хотя бы из того, что потенциал ротора
(9) в разной степени изменяется при смещениях в различных напра-
влениях, и является существенным недостатком подвеса.
Очевидно, что равножесткости подвеса можно добиться, вводя
уставки противоположного знака на диаметрально противоположных
электродах (назовем этот случай вторым законом управления):
ϕ
1
=
ϕ
0
э
−
Δ
ϕ
1
;
ϕ
3
=
−
(
ϕ
0
э
+ Δ
ϕ
1
);
ϕ
2
=
ϕ
0
э
−
Δ
ϕ
2
;
ϕ
4
=
−
(
ϕ
0
э
+ Δ
ϕ
2
);
ϕ
5
=
ϕ
0
э
−
Δ
ϕ
5
;
ϕ
6
=
−
(
ϕ
0
э
+ Δ
ϕ
5
)
.
(10)
Из (10), (8) и (2) следует, что
ϕ
0
=
−
2
{
(
ϕ
0
э
C
ˉ
x
10
−
kC
(0)
10
) (ˉ
x
+ ˉ
y
+ ˉ
z
)
−
kC
ˉ
x
2
10
(ˉ
x
3
+ ˉ
y
3
+ ˉ
z
3
)
−
−
kC
ˉ
y
2
+ˉ
z
2
10
[ˉ
x
(ˉ
y
2
+ ˉ
z
2
) + ˉ
y
(ˉ
x
2
+ ˉ
z
2
) + ˉ
z
(ˉ
x
2
+ ˉ
y
2
)]
o
/C
00
.
Однако здесь (рис. 4) даже в линейной зоне подвеса наблюдаются
большие значения потенциала, а максимальное значение при смеще-
нии в направлении электрода Э1 (
ψ
0
= 45
◦
и
θ
0
= 0
◦
)
достигает почти
0
,
5
ϕ
0
э
.
С точки зрения наведенного потенциала ротора второй вариант
управления несомненно хуже, сложнее он и в технической реализа-
104
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2008. № 1


