k
x
= 0
,
5
k
y
= 0
,
5
k
z
. Поскольку
k
y
=
ϕ
0
э
ˉ
y
max
, k
z
=
ϕ
0
э
ˉ
z
max
, k
x
=
2
ϕ
0
э
ˉ
x
max
,
то протяженность линейной зоны по оси
x
оказывается в четыре раза
больше, чем по осям
y
и
z
.
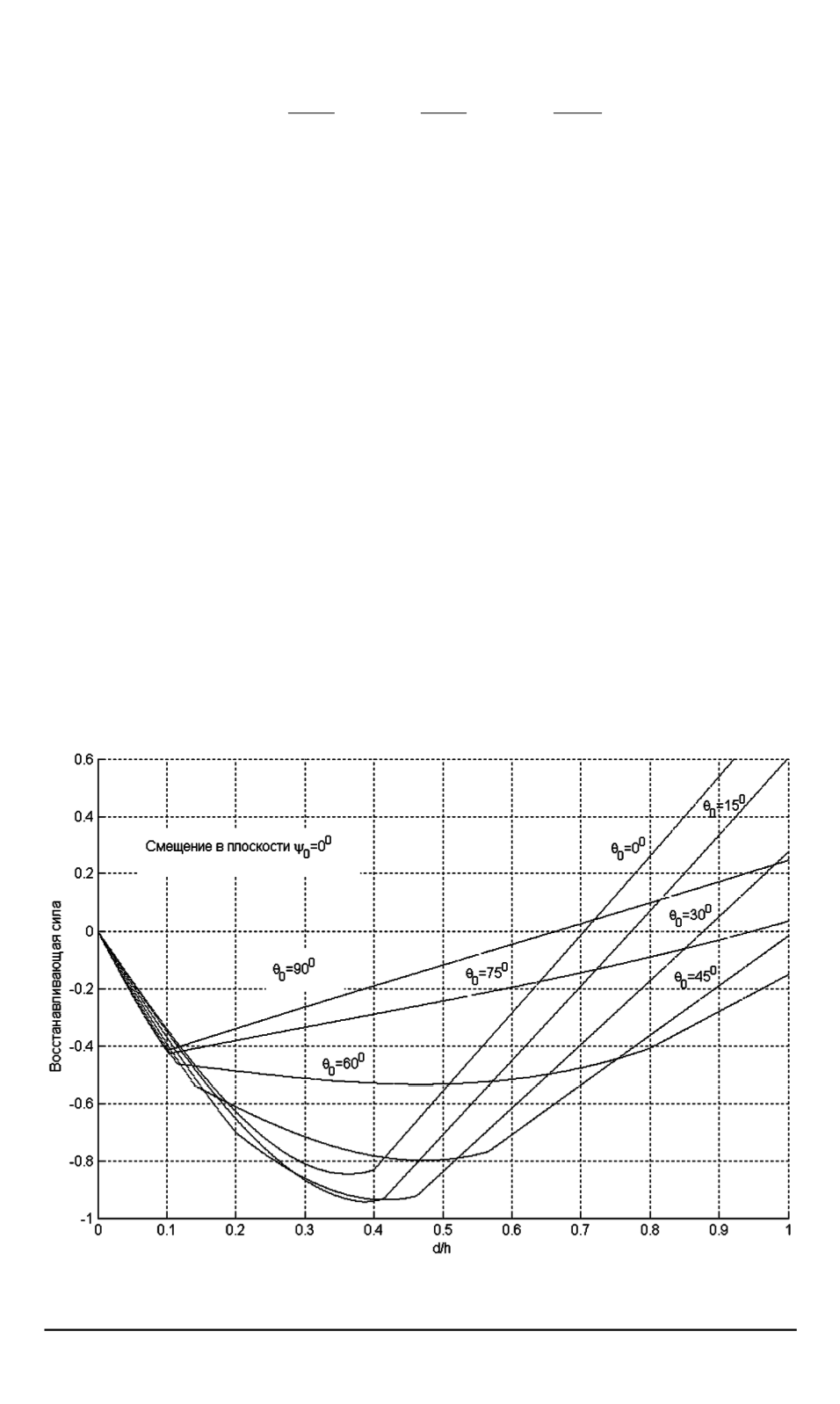
Статические силовые характеристики, построенные для выбран-
ных типоразмеров подвеса при смещении в плоскости
ψ
0
= 0
◦
, при-
ведены на рис. 5. Здесь
θ
0
= 0
◦
соответствует смещению по оси
x
в направлении электрода Э1 (см. рис. 1), а
θ
0
= 90
◦
— по оси
y
в на-
правлении электрода Э2. Остальные углы определяют промежуточные
направления смещения. Анализ кривых показывает, что характеристи-
ки практически равножестки при смещении в линейной зоне.
Важной характеристикой подвеса является предельное смеще-
ние, при котором сохраняются восстанавливающие свойства подвеса
(
F <
0)
. Как видно на рис. 5, максимальное относительное смеще-
ние при перемещении в любом направлении
(
d/h
)
max
6
0
,
66
. Это
свойство подвеса следует учитывать при проектировании упоров, с
которых осуществляется первоначальное всплытие ротора. Расчеты
также показывают, что при перемещении в плоскости
ψ
0
= 45
◦
мак-
симальное смещение возрастает до
0
,
7
.
Статические силовые характеристики при втором варианте упра-
вления и смещении в плоскости
ψ
0
= 0
◦
приведены на рис. 6. Подвес
Рис. 5. Статические силовые характеристики подвеса с сегментными электро-
дами при первом варианте управления
106
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2008. № 1


