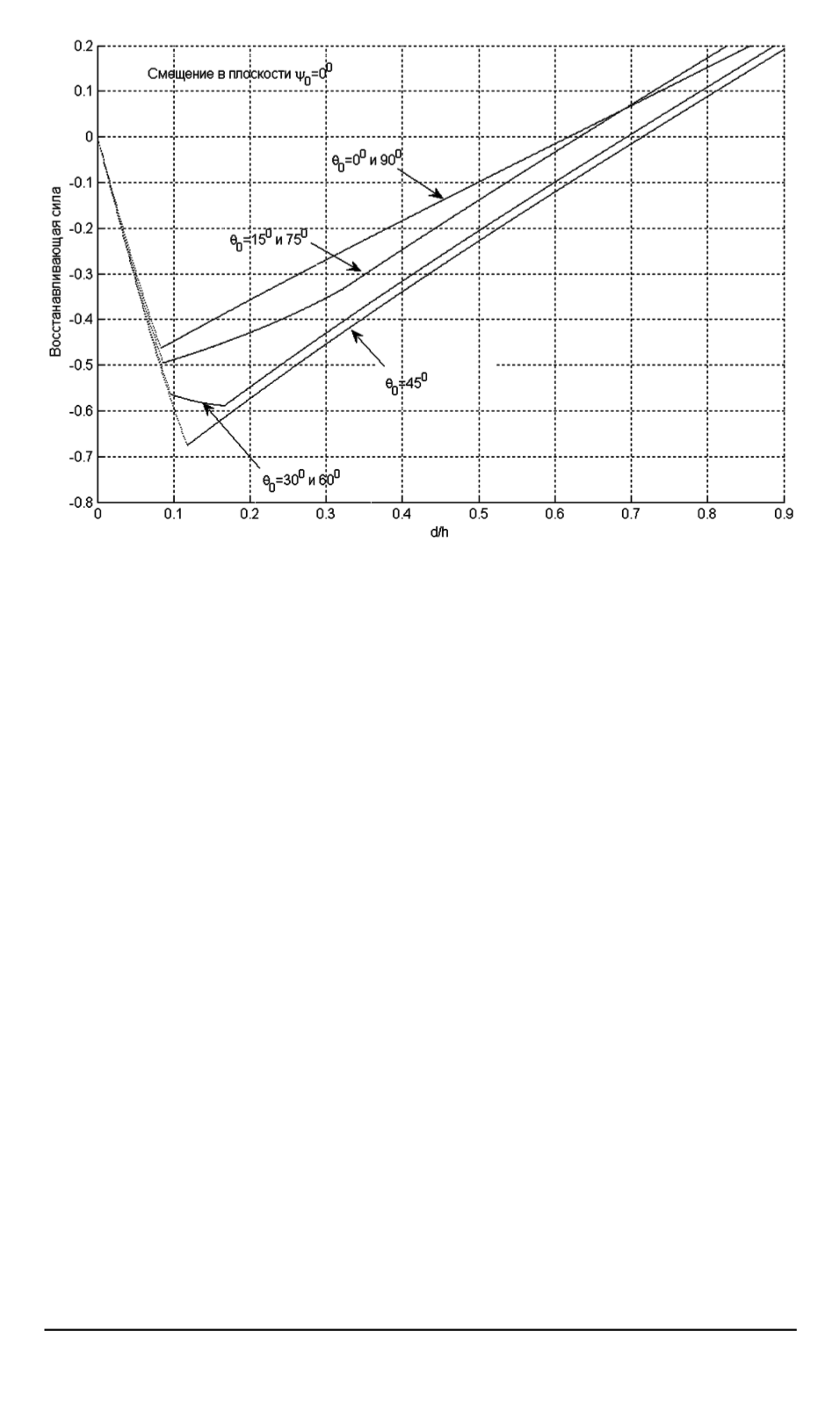
Рис. 6. Статические силовые характеристики подвеса с сегментными электро-
дами при втором варианте управления
равножесткий при смещениях в любом направлении. Однако предель-
ные величины смещений при которых сохраняется восстанавливаю-
щая сила подвеса, здесь ниже, чем у первого варианта управления:
(
d/h
)
max
6
0
,
62
(против
0
,
66
в первом варианте) при смещении в
плоскости
ψ
0
= 0
◦
и
(
d/h
)
max
6
0
,
56
(против
0
,
7
) при смещении в
плоскости
ψ
0
= 45
◦
.
Оценим теперь степень влияния потенциала ротора. Расчет сило-
вых характеристик показывает, что при первом варианте управления
учет или не учет потенциала ротора при вычислениях силовых харак-
теристик несущественен. При втором варианте (рис. 7) наблюдается
значительное влияние наведенного потенциала на вид статических си-
ловых характеристик, приводящее к уменьшению диапазона действия
восстанавливающей силы. Подвес при втором варианте управления
более чувствителен к изменениям потенциала ротора. Если потенциал
ротора нестабилен, а это может быть вызвано наличием неконтроли-
руемого случайного заряда ротора
q
0
(вторая составляющая в выраже-
нии (2)), то эта нестабильность напрямую перейдет в нестабильность
силовой характеристики, а следовательно, и центрирования ротора.
Таким образом, можно констатировать, что применение второго
варианта управления (10) приводит как к большому значению наве-
денного потенциала ротора
ϕ
0
, так и к менее стабильным силовым
характеристикам со сниженным диапазоном действия восстанавлива-
ющей силы. Исходя из этого, использование закона (10) в конкретных
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2008. № 1
107


