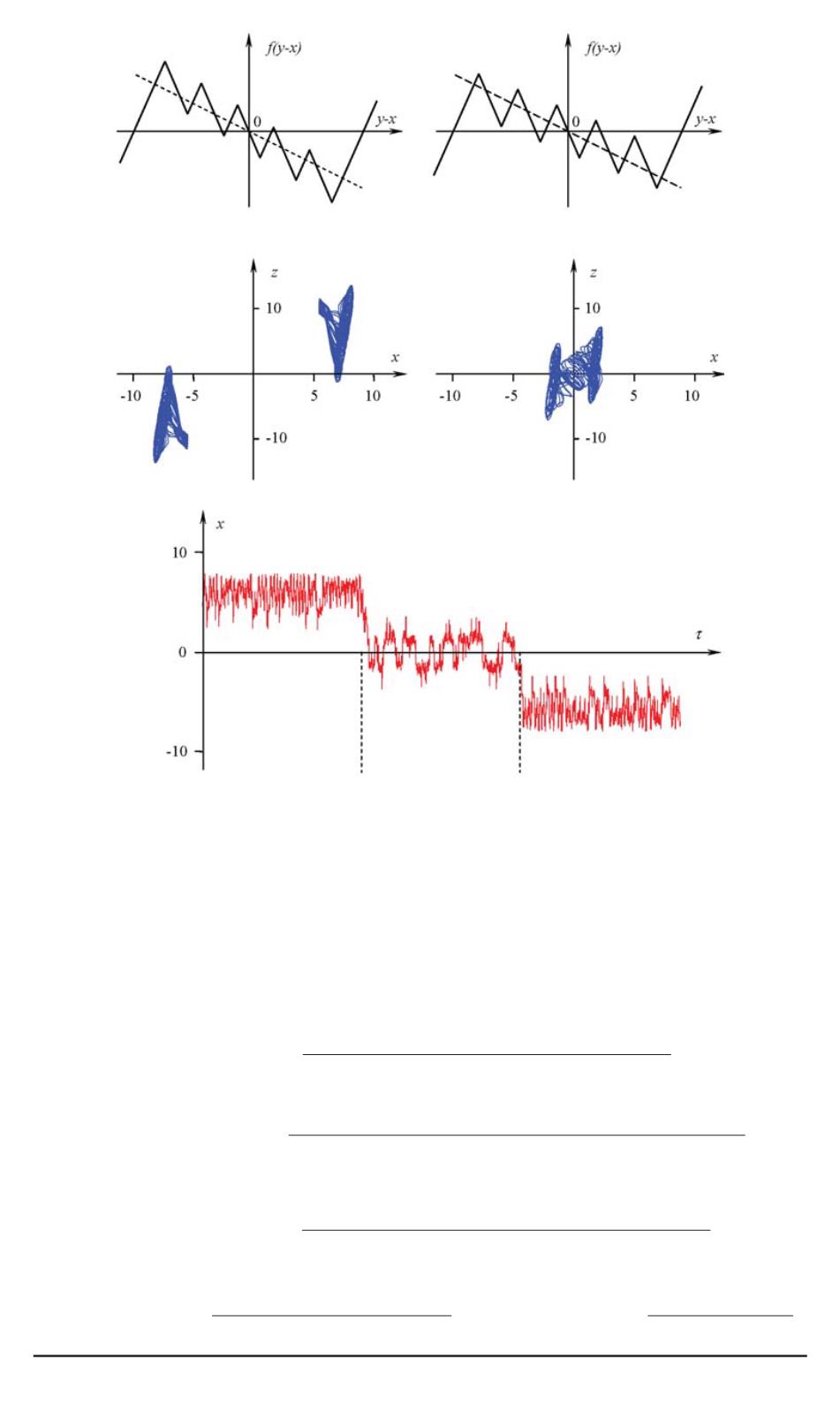
Рис. 7. Модуляция разворотом нелинейной функции относительно оси сим-
метрии
Здесь используется нелинейная функция (1) (соответствует рис. 1–4)
или ее обобщение на случай различных наклонов и произвольного
относительного положения сегментов:
S
(
ξ
) =
S
0(
ξ
) +
Sm
(
ξ
) +
Sn
(
ξ
) +
Sme
(
ξ
) +
Sne
(
ξ
);
(3)
S
0(
ξ
) =
am
0
|
ξ
−
cn
0
| − |
ξ
−
cm
0
|
+
cm
0
−
cn
0
2
;
Sm
(
ξ
) =
M
m
=1
am
m
|
ξ
−
cm
m
−
1
| − |
ξ
−
cm
m
|
+
cm
m
−
cm
m
−
1
2
;
Sn
(
ξ
) =
N
n
=1
an
n
|
ξ
−
cn
n
| − |
ξ
−
cn
n
−
1
|
+
cn
n
−
cn
n
−
1
2
;
Sme
(
ξ
) =
am
M
|
ξ
−
cm
M
|
+
ξ
−
cm
M
2
, Sne
(
ξ
) =
an
N
ξ
− |
ξ
−
cn
N
|
2
;
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2010. № 3
105


