














 5 / 10
5 / 10

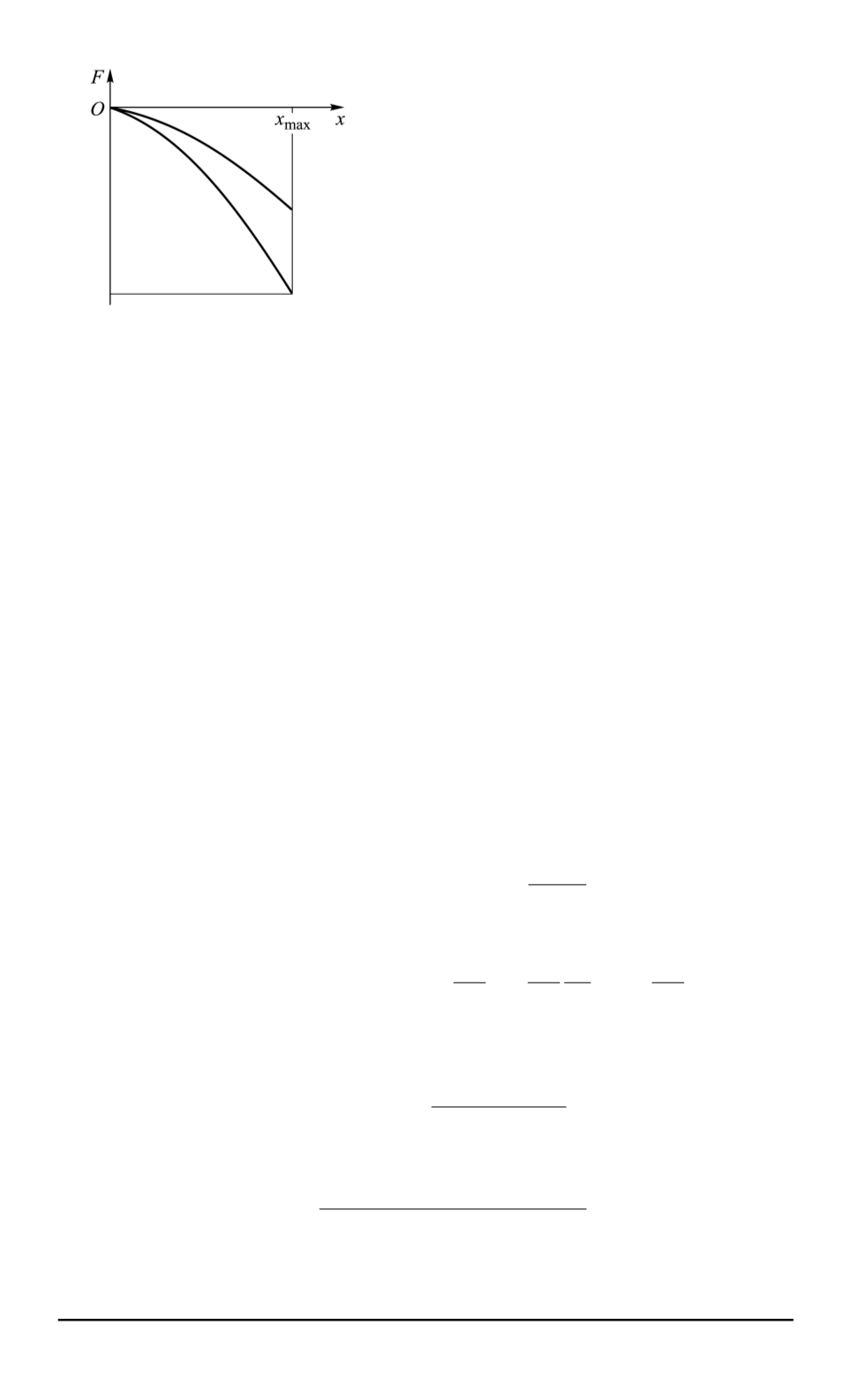
Рис. 1. Зависимость контактной
силы от деформации при упругом
ударе
упругая сила взаимодействия тел при
ударе;
d
— постоянная сухого трения.
В процессе удара
x
≥
0
, в начале
и в конце —
x
= 0
. Упругая сила взаи-
модействия тел при ударе равна нулю
в начале и конце удара
f
(0) = 0
и
является возрастающей функцией де-
формации
x
.
Как уже было отмечено, в моде-
лях удара Герца и Ханта – Кроссли
предполагается, что упругая сила
взаимодействия тел при ударе равна
f
(
x
) =
cx
n
. Уравнение движения тела в фазе деформирования (при
V
= ˙
x >
0
) имеет вид
m
¨
x
=
F
(
x,
˙
x
) =
−
f
(
x
)(1 +
d
)
,
(3)
где
m
– масса тела.
В конце фазы деформирования
V
= ˙
x
= 0
. Если постоянная сухого
трения
d
≥
1
, то в конце фазы деформирования тело останавливается.
Контактная сила взаимодействия равна нулю. Удар абсолютно неупру-
гий. Если
d <
1
, то удар является упругим и в фазе восстановления
(при
V
= ˙
x >
0
) уравнение движения имеет вид
m
¨
x
=
F
(
x,
˙
x
) =
−
f
(
x
)(1
−
d
)
.
(4)
Зависимость контактной силы от деформации при упругом ударе при-
ведена на рис. 1.
Обозначим через
Π(
x
)
потенциальную энергию упругой деформа-
ции
Π(
x
) =
x
Z
0
f
(
x
)
dx.
В частности,
Π(
x
) =
cx
n
+1
n
+ 1
при
f
(
x
) =
cx
n
.
Исключим время
t
из дифференциальных уравнений движения (3),
(4) с помощью преобразования
¨
x
=
dV
dt
=
dV
dx
dx
dt
=
V
dV
dx
. Разделяя
переменные в полученных уравнениях и интегрируя их, находим пер-
вые интегралы — интегралы энергии. В фазе деформирования имеем
V
2
= (
V
−
)
2
−
2(1 +
d
)Π(
x
)
m
,
(5)
в фазе восстановления —
V
2
=
2(1
−
d
)(Π(
x
max
)
−
Π(
x
))
m
.
(6)
Здесь
x
max
— максимальное перемещение тела при ударе или значе-
ние
x
в конце фазы деформирования. Значение
x
max
определяется из
94
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2016. № 1