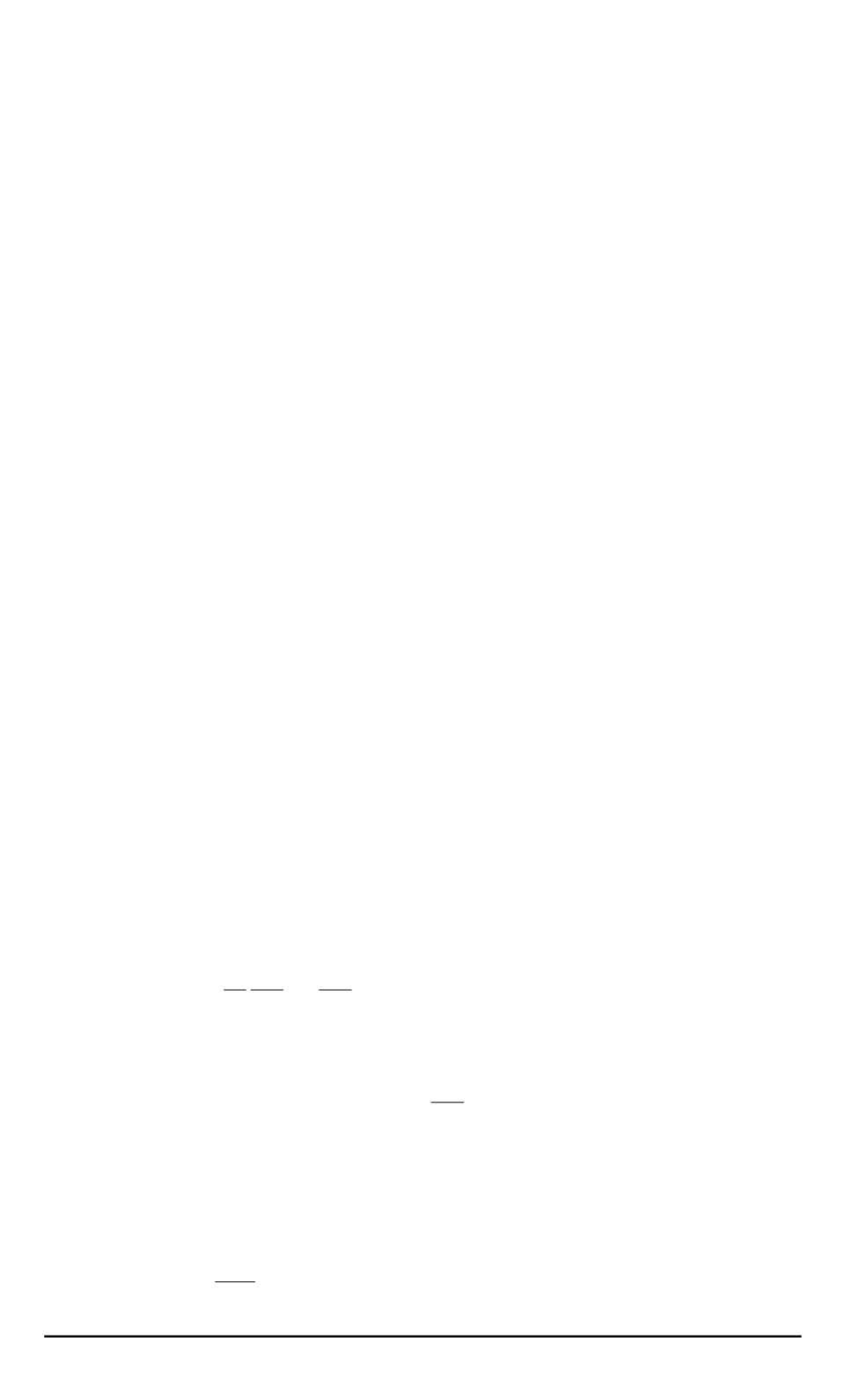
новесия трехзвенного маятника
(
рис
. 1).
Условия устойчивости устана
-
вливаются с помощью линеаризованных уравнений движения
.
Маятник состоит из трех невесомых стержней
AB
,
BC
и
CD
оди
-
наковой длины
l
.
В точках
B
,
C
и
D
помещены три одинаковых груза
,
масса каждого из которых равна
m
.
Шарниры в точках
A
,
B
и
C
харак
-
теризуются коэффициентом жесткости
a
.
На стержень
CD
действует
постоянная по своему значению следящая сила
P
.
Направление этой
силы совпадает с направлением
CD
.
Положение маятника определяет
-
ся углами
ϕ
i
,
i
= 1
,
2
,
3
,
которые характеризуют отклонение стержней
от вертикального положения
.
В положении равновесия маятника имеем
ϕ
i
= 0
.
Получим уравнения движения маятника
.
Введем систему отсче
-
та
(
см
.
рис
. 1).
Координаты точек
B
,
C
и
D
имеют вид
x
i
=
i
X
j
=1
l
sin
ϕ
j
, y
i
=
i
X
j
=1
l
cos
ϕ
j
, i
= 1
,
2
,
3
.
Тогда их скорости соответствуют выражениям
˙
x
j
=
i
X
j
=1
l
˙
ϕ
j
cos
ϕ
j
,
˙
y
i
=
−
i
X
j
=1
l
˙
ϕ
j
sin
ϕ
j
.
Вариации координат имеют вид
δx
i
=
i
X
j
=1
l
cos
ϕ
j
δϕ
j
, δy
i
=
−
i
X
j
=1
l
sin
ϕ
j
δϕ
j
.
Для нахождения уравнений движения используем уравнения Ла
-
гранжа второго рода
:
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
=
Q
П
i
+
Q
Р
i
, i
= 1
,
2
,
3
,
(1)
где
q
i
=
ϕ
i
;
T
—
кинетическая энергия маятника
;
Q
П
i
—
обобщен
-
ная потенциальная сила
,
Q
П
i
=
−
∂
П
∂q
i
,
П
—
потенциальная энергия
;
Q
Р
i
—
обобщенная сила
,
возникающая в результате действия следящей
силы
P
.
Кинетическая энергия маятника имеет вид
T
=
ml
2
2
(3 ˙
ϕ
2
1
+ 2 ˙
ϕ
2
2
+ ˙
ϕ
2
3
+ 4 ˙
ϕ
1
˙
ϕ
2
cos(
ϕ
1
−
ϕ
2
)+
20
ISSN 1812-3368.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Естественные науки
”. 2004.
№
3


