
















 10 / 15
10 / 15

различимы эти системы при разных способах их синхронизации. Зна-
чения
4
T
2
≈
10
−
13
с сравнимы по порядку с точностью, которая обес-
печивается современными спутниковыми системами навигации. Оче-
видно, что такая погрешность объясняется особенностью процедуры
синхронизации. Однако реализуемая в действительности синхрониза-
ция часов на Земле и ИСЗ, основанная на обмене электромагнитными
сигналами, проходящими через атмосферу Земли, обладает еще боль-
шей погрешностью.
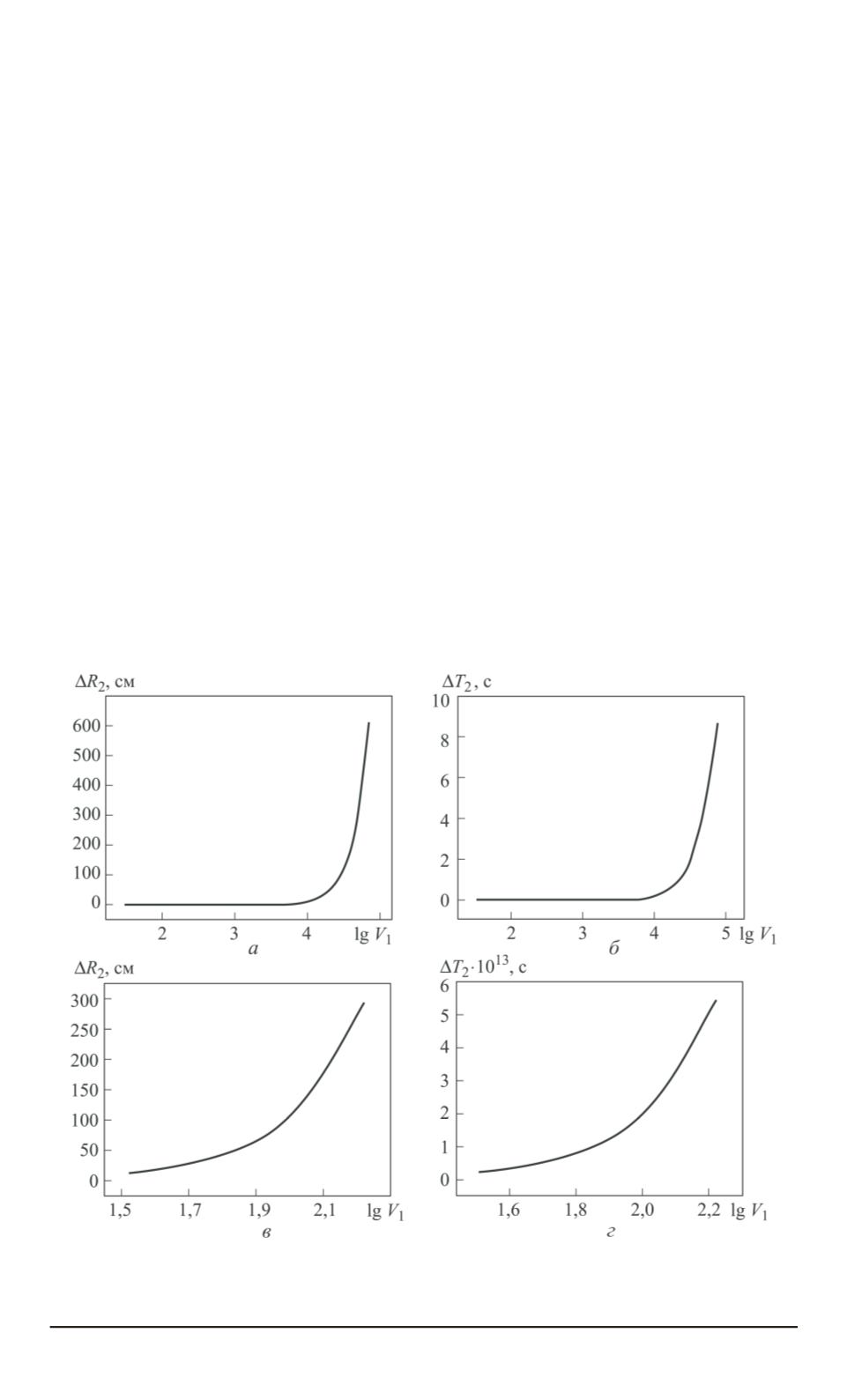
Зависимости разности
4
R
2
пересчитанных значений координат со-
бытия
S
из ИСО, связанной с наземным наблюдателем, в ИСО, связан-
ную с ИСЗ, от скорости движения
V
1
системы, связанной с наземным
наблюдателем, приведены на рис. 3,
а
и
в
. В этом случае время синхро-
низации было постоянным и равнялось
t
0
= 360
с, скорость движения
первой системы —
V
1
= 33
км/с. С учетом этой зависимости при низ-
ких скоростях погрешность изменяется достаточно мало, но уже при
приближении к релятивистским скоростям наблюдается резкий пере-
гиб и увеличение погрешности расчета, что полностью соответствует
теории.
Аналогичная зависимость наблюдается и при рассмотрении зави-
симостей разности
4
T
2
пересчитанных значений времени регистра-
ции события
S
ИСО, связанной с наземным наблюдателем, и ИСО,
Рис. 3. Зависимости разностей
Δ
R
2
(
а, в
),
Δ
T
2
(
б, г
) от скорости движения
V
1
системы, связанной с наземным наблюдателем
104
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2015. № 2