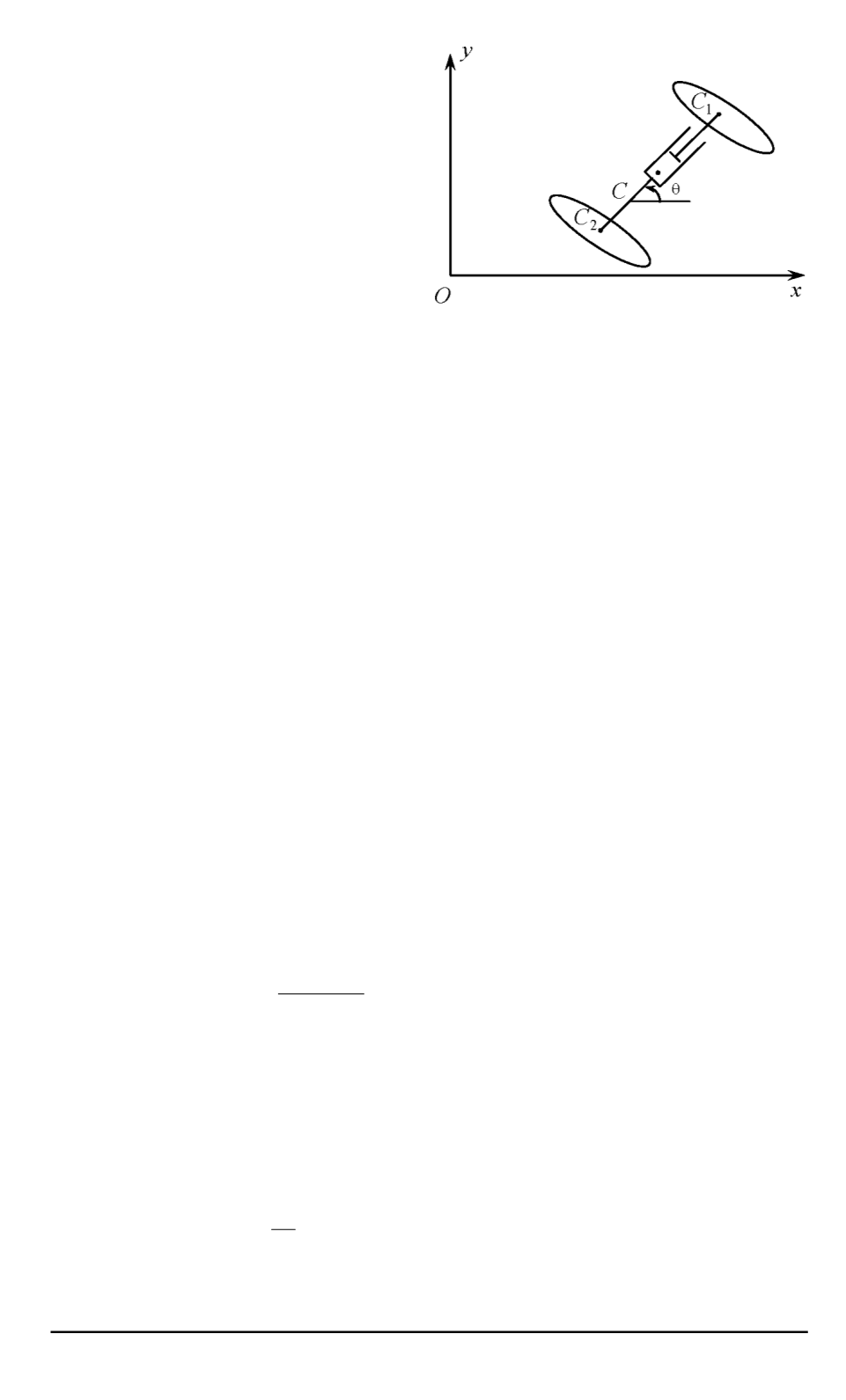
Рис. 1. Конструктивная схема связки
двух тел
значений координат и скоростей
в момент отрыва от опорной по-
верхности за счет изменения дви-
жения ног относительно корпуса
[2–3, 7].
Для исследования вопроса о
допустимых значениях ошибок,
которые способен отработать ал-
горитм стабилизации, предста-
вляет интерес задача об опре-
делении минимального и макси-
мального времени разворота ап-
парата в фазе полета из заданного начального в заданное конечное по-
ложение при известном (ненулевом) значении кинетического момента
аппарата относительно центра масс.
В настоящей работе эта задача решена для простейшей модели
аппарата — связки двух тел.
Постановка задачи.
Предполагается, что аппарат состоит из двух
твердых тел массами
m
1
и
m
2
, соединенных линейным сервоприводом
(рис. 1). Момент инерции
i
-го
(
i
=
1
,
2
)
тела относительно центра
масс
C
i
равен
J
i
. Расстояние между центрами масс
C
1
C
2
=
l
изме-
няется с помощью линейного сервопривода; точка
C
— центр масс
связки тел. Положение системы относительно абсолютной неподвиж-
ной системы координат
Ox y
(ось
Oy
направлена вертикально вверх)
определяется координатами центра масс
x
C
,
y
C
, углом тангажа
θ
и
расстоянием
l
. Обозначим
l
i
расстояние от центра масс системы до
центра масс
i
-го тела.
В безопорной фазе движения имеет место закон сохранения кине-
тического момента относительно центра масс:
K
C
=
(
I
+
μ
l
2
)
˙
θ
=
const
,
(1)
где
I
=
J
1
+
J
2
;
μ
=
m
1
m
2
m
1
+
m
2
.
Обозначим
l
D
, θ
D
требуемое конечное положение связки относи-
тельно центра масс в конечный момент времени.
Для определенности положим
K
C
>
0
.
(2)
За параметр управления примем скорость изменения расстояния
между телами
u
=
dl
dt
и положим, что ее значение ограничено мак-
симальной скоростью сервопривода
|
u
|
6
u
m
. Введем обозначения:
x
1
=
l
,
x
2
=
θ
−
θ
D
.
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2007. № 4
21


