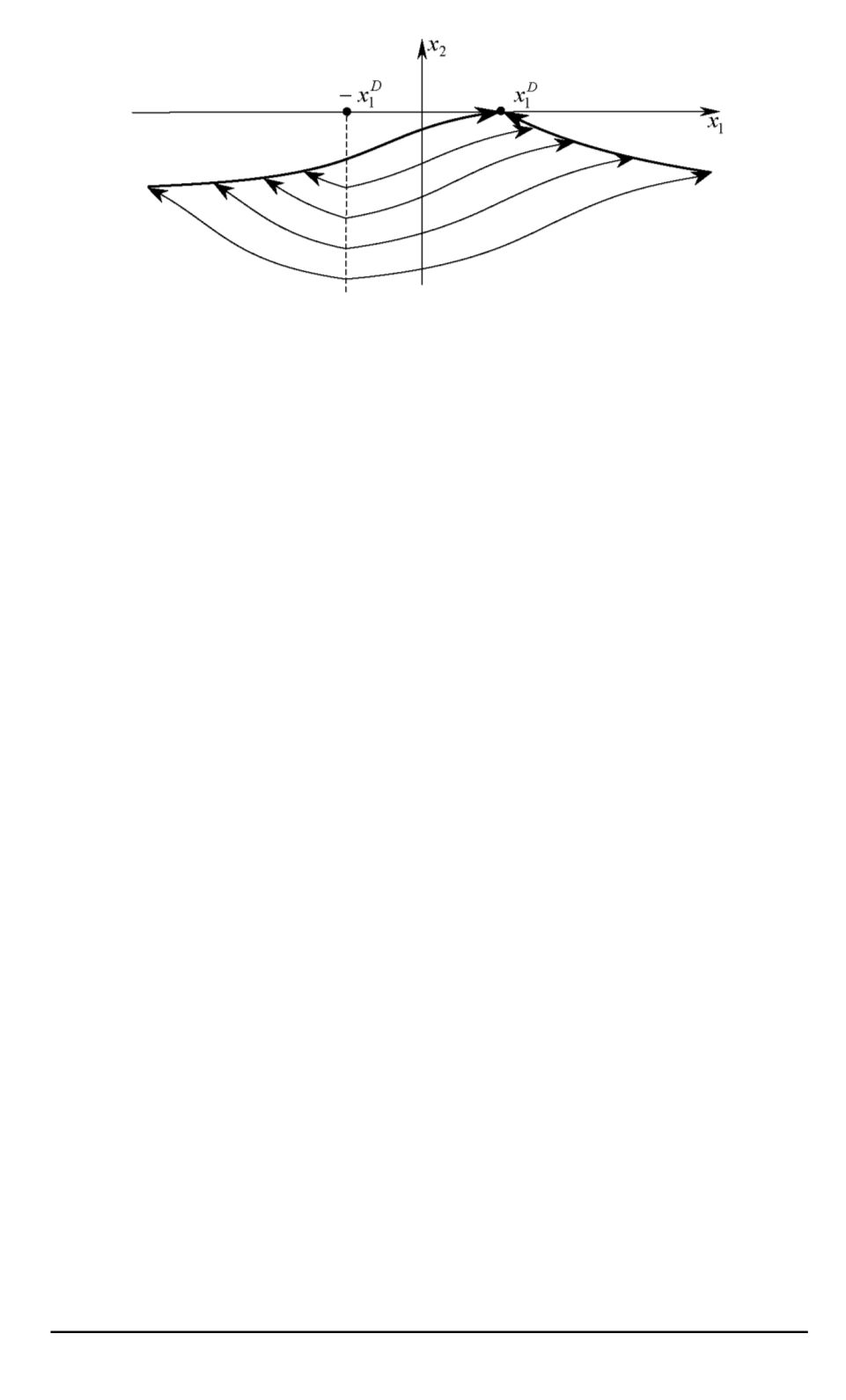
Рис. 6. Оптимальные фазовые траектории в задаче максимизации времени
разворота
имеет вид
u
=
(
−
u
m
при
(
x
1
,
x
2
)
2 ˜
R
1
∪
0
−
,
+
u
m
при
(
x
1
,
x
2
)
2 ˜
R
2
∪
0
+
.
(17)
Если система находится в области
˜
R
1
, то оптимальная управляю-
щая последовательность
{−
u
m
,
u
m
}
, а если система находится в обла-
сти
˜
R
2
, то оптимальная управляющая последовательность
{
u
m
,
−
u
m
}
.
Другими словами, если на фазовой плоскости система находится
справа от линии
x
1
= −
x
D
1
, то оптимальной является траектория типа
B
. Если же на фазовой плоскости система находится слева от линии
x
1
= −
x
D
1
, то оптимальной является траектория типа
A
.
Доказательство утверждения 3 приведено в работе [17].
Оптимальные фазовые траектории при различных начальных усло-
виях показаны на рис. 6.
В заключение отметим, что если при движении аппарата реаль-
ное время полета
T
(определяемое из уравнений движения центра
масс) удовлетворяет условию
T
min
<
T
<
T
max
, то аппарат в дви-
жении вокруг центра масс можно перевести из заданного начально-
го в заданное конечное положение за время
T
. Решение можно ис-
кать в виде кусочно-постоянных управляющих последовательностей
{±
u
m
,
0
,
±
u
m
}
. При этом возможно любое сочетание знаков управле-
ния на первом и третьем этапе и возможна нулевая продолжительность
любого этапа с постоянным значением управления.
Работа выполнена по гранту НШ 6108.2006.8 по поддержке веду-
щих научных школ РФ и гранту РФФИ № 07-01-00286.
СПИСОК ЛИТЕРАТУРЫ
1. O k h o t s i m s k y D. E., et al. Walking machines // Advances in mechanics. –
1992. – № 1–2.
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2007. № 4
27


