Рис
. 1.
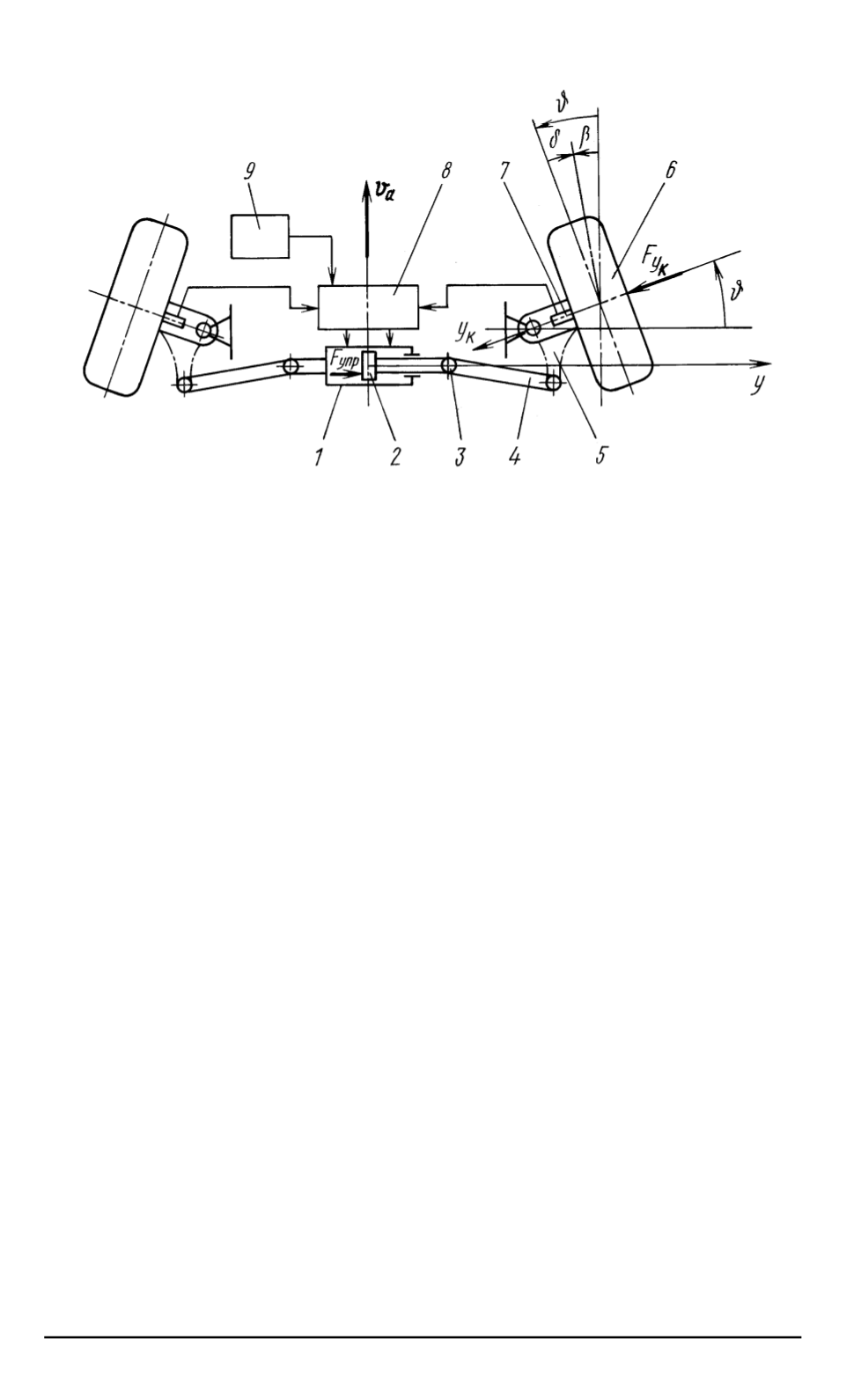
Схема системы автоматического регулирования угла схождения управля
-
емых колес автомобиля
(
вид сверху
):
1
—
корпус гидроцилиндра
,
регулирующего угол схождения
;
2
—
поршень гидро
-
цилиндра
;
3
—
шарнир рулевой трапеции
;
4
—
боковая тяга рулевой трапеции
;
5
—
поворотный рычаг цапфы колеса
;
6
—
управляемое колесо
;
7
—
датчик боко
-
вой силы
;
8
—
блок управления
;
9
—
гидронасос
(
включая массу колеса
);
F
упр
—
управляющая сила
,
приложенная к
поршню гидроцилиндра
;
F
тр
—
сила трения в приводе к управляемому
колесу
.
Как показали испытания
,
при движении автомобиля в нормальных
условиях
(
при благоприятных условиях на дороге и скорости от
60
до
100
км
/
ч
)
управляющую силу
F
упр
можно считать прямо пропорцио
-
нальной боковой силе
F
y
к
,
действующей на колесо
,
и
,
следовательно
,
боковому перемещению
y
к
центра колеса
:
F
упр
=
−
n
1
y
к
.
Примем такой закон управления и исследуем условия устойчивости его
действия
.
Силу трения
F
тр
в приводе при перемещении поршня можно счи
-
тать прямо пропорциональной скорости
˙
y
перемещения поршня
[2]:
F
тр
=
−
k
˙
y
;
здесь
k
—
некоторый коэффициент
.
Таким образом
,
уравнение
(1)
принимает вид
m
п
¨
y
=
−
n
1
y
к
−
k
˙
y.
Связь скорости
˙
y
к
поперечного упругого перемещения колеса
(
в ре
-
альности это упругая поперечная деформация шины
)
и скорости авто
-
мобиля
v
а
описывается уравнением
˙
y
к
=
v
а
tg
β,
(2)
12
ISSN 1812-3368.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Естественные науки
”. 2004.
№
3


