















 9 / 13
9 / 13

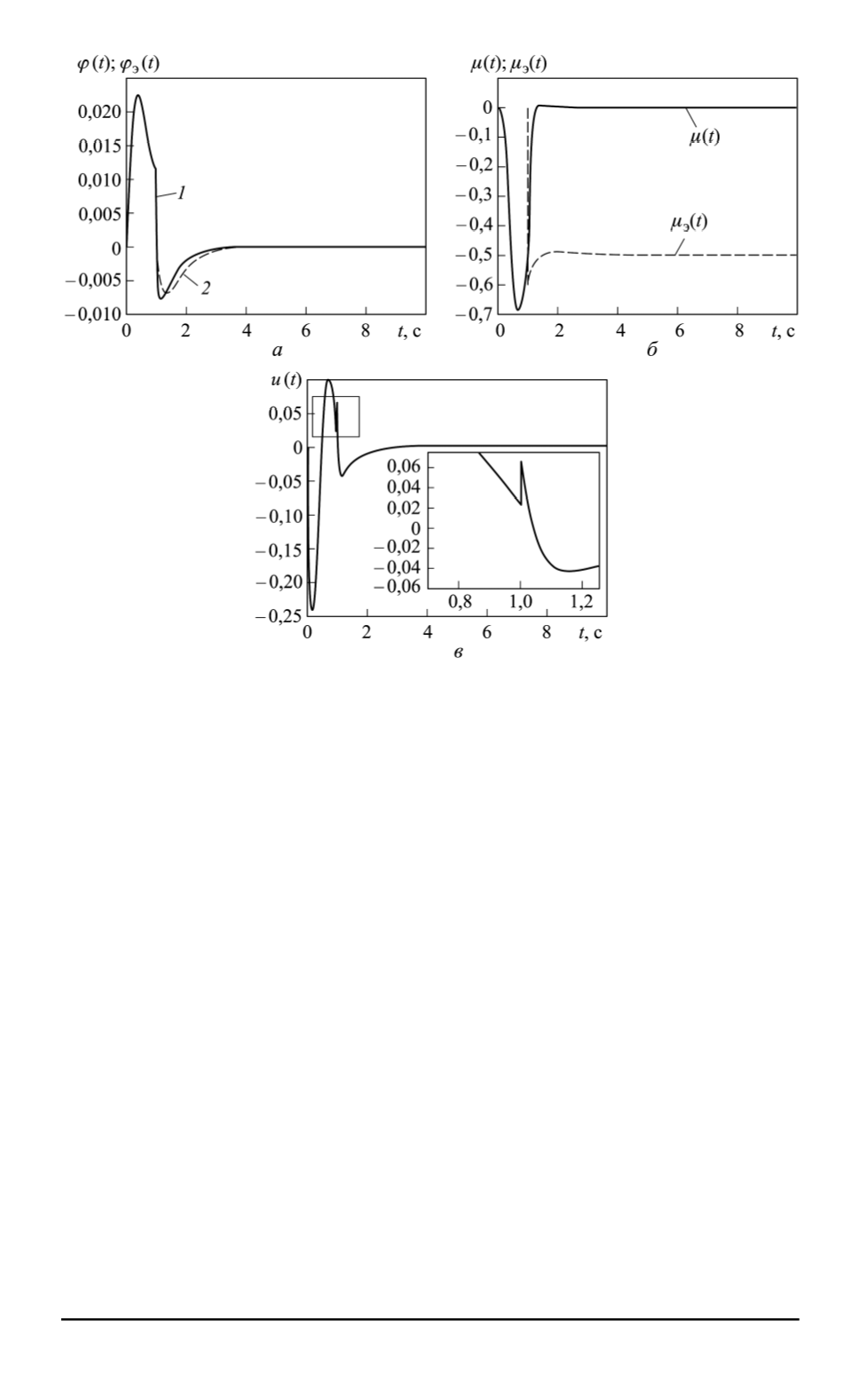
Рис. 3. Зависимости фазовых координат
ϕ
(
t
)
(
а
),
μ
(
t
)
(
б
) и управления
u
(
t
)
(
в
)
от времени, иллюстрирующие работу дополнительного регулятора
матрицы
Q =
diag
{
30
,
323 0
,
032 0
,
028 0
,
271
}
(выбор значения
r
и по-
следующих значений матрицы
Q
влияет лишь на значение критерия
оптимальности, но не на получаемые результаты).
Результаты.
Зависимости фазовых координат
ϕ
(
t
)
,
μ
(
t
)
и упра-
вления
u
(
t
)
от времени, иллюстрирующие работу дополнительного
регулятора, приведены на рис. 3.
Первый регулятор включился спустя одну секунду после сброса
нагрузки на 50% (
λ
=
−
0
,
5
). Выбраны следующие значения параме-
тров эталонных сигналов
a
=
−
0
,
015
,
α
= 0
,
8
. На приведенных за-
висимостях видна характерная точка, соответствующая моменту вре-
мени
t
= 1
с, когда включился второй регулятор. Стабилизация двух
основных координат относительного изменения частоты вращения ро-
тора турбины
ϕ
(
t
)
и относительного отклонения поршня сервомотора
μ
(
t
)
происходит по траекториям, близким к эталонным. На зависимо-
сти
u
(
t
)
виден “всплеск” сигнала, что объясняется особенностью ги-
дравлической системы регулирования рассматриваемой турбины. Ее
главный элемент — трансформатор давления системы, к которому по-
ступает прямой импульс по частоте вращения от насоса-регулятора
(датчика частоты вращения ротора турбины). Трансформатор давления
108
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2015. № 5