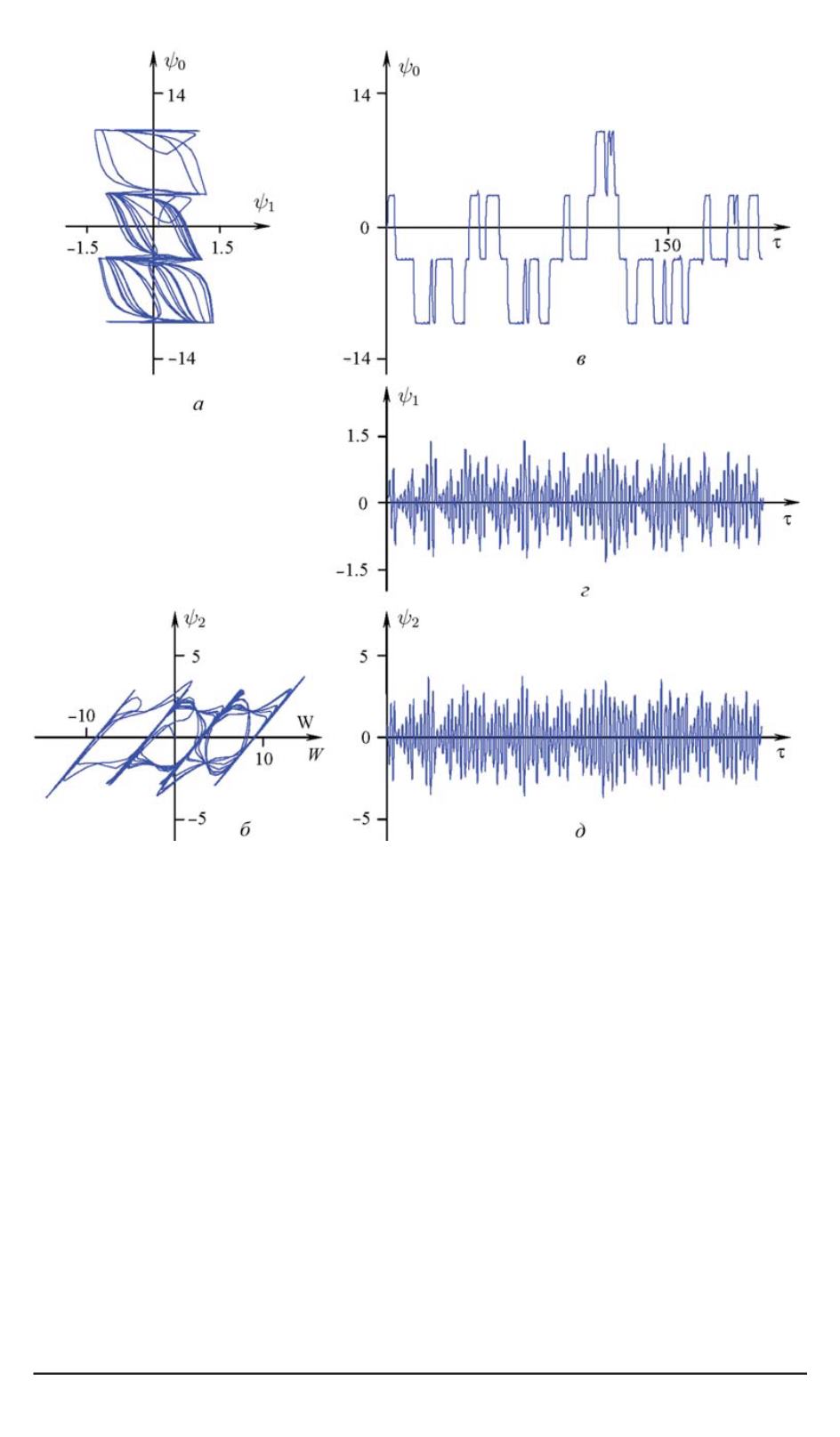
Рис. 5. Примеры проекций хаотического аттрактора системы (2) при
M
=
N
= 1
на плоскость
(
ψ
0
, ψ
1
)
(
а
) и плоскость
(
ψ
2
, W
)
(
б
) и примеры
временн ´ых зависимостей функций
ψ
0
(
в
),
ψ
1
(
г
),
ψ
2
(
д
)
Иными словами, в общем случае независимые переменные автостоха-
стических систем рассматриваемого типа представляют собой некото-
рые линейные комбинации функций
ψ
0
,
ψ
1
и
ψ
2
. И наоборот, каждая
изфункций
ψ
0
,
ψ
1
и
ψ
2
представляет собой линейную комбинацию
независимых переменных:
⎡
⎣
ψ
0
ψ
1
ψ
2
⎤
⎦
=
⎡
⎣
k
x
0
k
y
0
k
z
0
k
x
1
k
y
1
k
z
1
k
x
2
k
y
2
k
z
2
⎤
⎦
⎡
⎣
x
y
z
⎤
⎦
=
K
−
1
⎡
⎣
x
y
z
⎤
⎦
.
(6)
Коэффициенты матрицы
K
и обратной ей матрицы
K
−
1
опреде-
ляются параметрами уравнений (2–4), т.е. особенностями конкретной
динамической системы и режимом колебаний.
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2010. № 1
53


