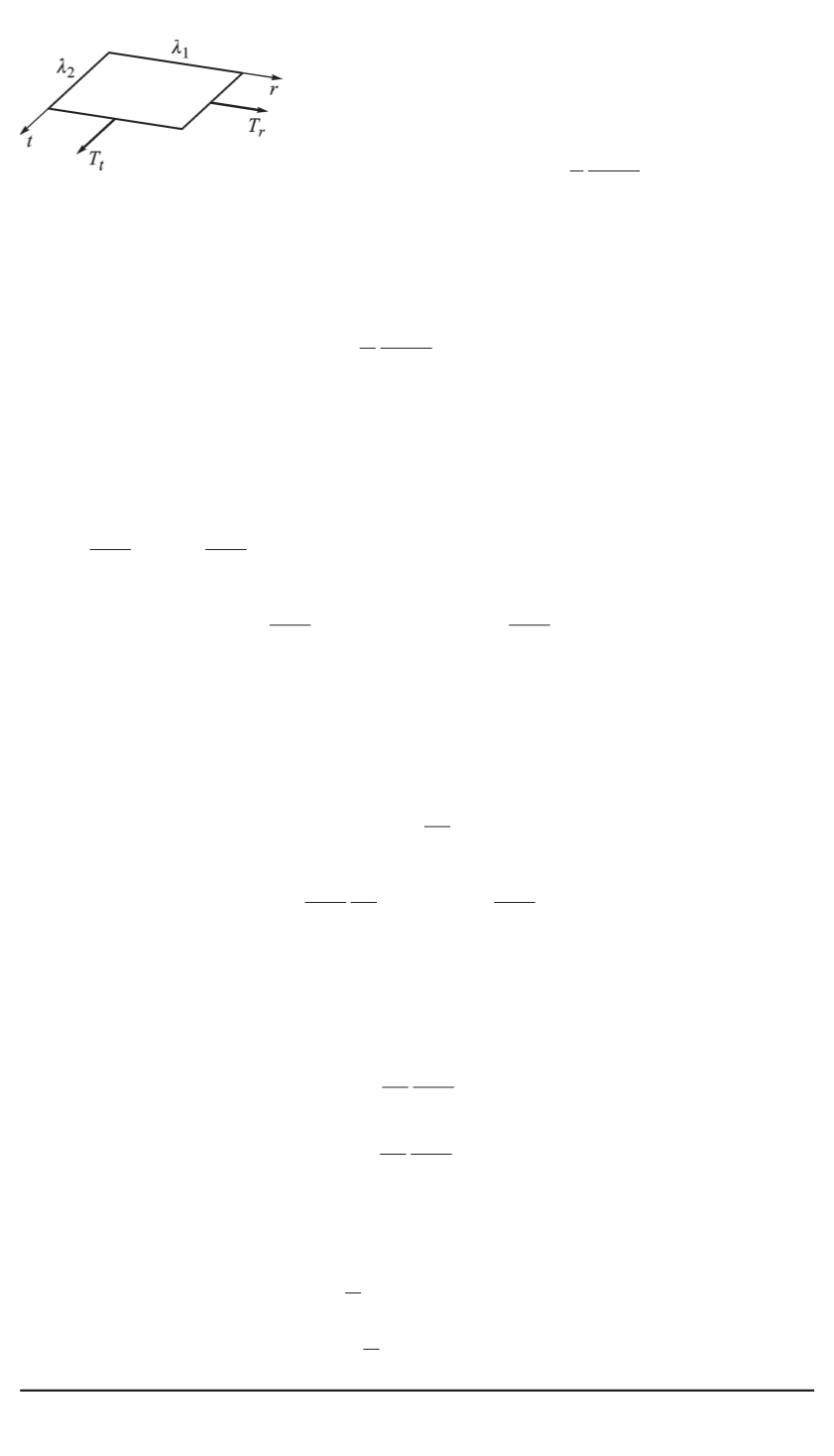
Рис. 5. Расчетная схема
элемента поверхности
при деформации не меняется; после дефор-
мации длины сторон элемента равны
λ
1
и
λ
2
(рис. 5). Тогда
−
α
=
λ
1
λ
2
−
1
, β
=
1
2
1
λ
1
λ
2
(
λ
2
1
+
λ
2
2
)
−
1
.
На стадии деформирования с постоянной
площадью
α
= 0
, поэтому упругий потен-
циал приобретает вид
F
=
μβ
=
μ
2
1
λ
1
λ
2
λ
2
1
+
λ
2
2
−
1
.
(3)
При деформировании элемента его стороны получают виртуальные
удлинения
∂λ
1
и
∂λ
2
, приложенные к сторонам элемента силы совер-
шат удельную работу
δυ
=
T
r
λ
2
δλ
1
+
T
t
λ
1
δλ
2
, а удельная потенциаль-
ная энергия деформации (упругий потенциал) получит приращение
δF
=
∂F
∂λ
1
δλ
1
+
∂F
∂λ
2
δλ
2
. Приравнивая
δυ
к
δF
, имеем
T
r
λ
2
−
∂F
∂λ
1
δλ
1
+
T
t
λ
1
−
∂F
∂λ
2
δλ
2
= 0
.
(4)
Так как на стадии деформирования с постоянной площадью
α
= 0
,
то
λ
1
λ
2
= 1
и
λ
1
δλ
2
+
λ
2
δλ
1
= 0
.
Подставляя выражение
δλ
1
=
−
λ
1
λ
2
δλ
2
в (4), получаем
−
T
r
λ
1
+
∂F
∂λ
1
λ
1
λ
2
+
T
t
λ
1
−
∂F
∂λ
2
δλ
2
= 0
.
В силу произвольности выбора
δλ
2
окончательно получаем выра-
жения для
T
r
и
T
t
c точностью до аддитивной постоянной
˘
T
(что
является результатом неизменности площади поверхности) в виде
T
r
=
1
λ
2
∂F
∂λ
1
+ ˘
T ,
T
t
=
1
λ
1
∂F
∂λ
2
+ ˘
T .
(5)
Продифференцировав выражение для упругого потенциала (3) по
λ
1
и
λ
2
и подставив в уравнения (5) c учетом равенства
λ
1
λ
2
= 1
, получ им
T
r
=
μ
2
λ
2
1
−
λ
2
2
+ ˘
T ,
T
t
=
−
μ
2
λ
2
1
−
λ
2
2
+ ˘
T .
(6)
92
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2012. № 2


