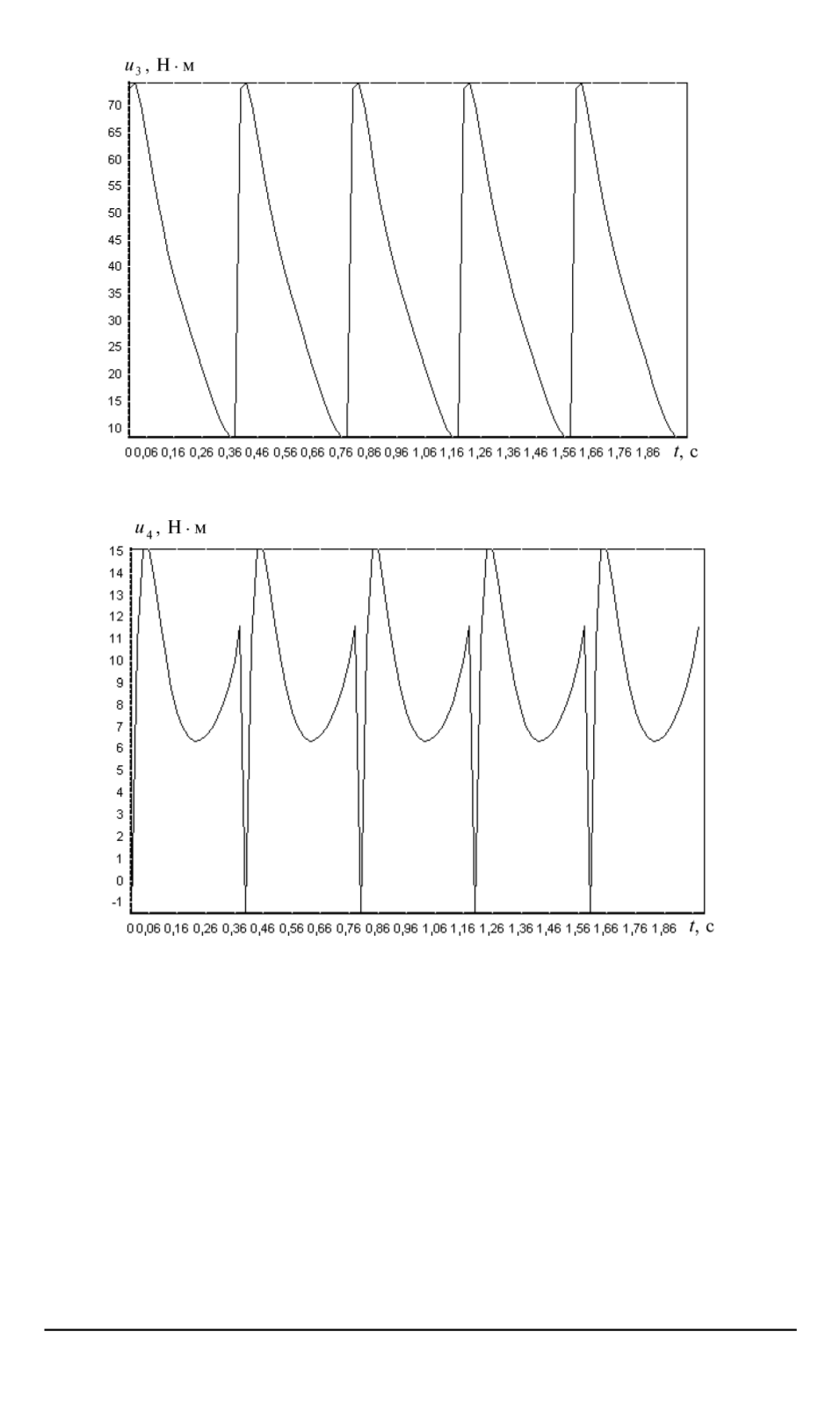
Рис. 11. Изменение управления
u
3
(
t
)
в пределах пяти шагов
Рис. 12. Изменение управления
u
4
(
t
)
в пределах пяти шагов
опорного движения переносимая нога опускается на поверхность сле-
дующей ступени и при
t
= 0
,
38
с принимает значение
0
,
08
м, равное
высоте ступени
l
Z
. В момент удара происходит скачкообразное изме-
нение величины
Z
1
. Это объясняется изменением роли ног после удара
и связанным с ним переобозначением переменных.
Выводы.
В настоящей работе представлено решение задачи обес-
печения периодического движения по лестнице двуногого пятизвен-
ного робота с коленями. Поставленная задача сформулирована как
задача поиска вектора состояния робота в момент перед ударом ноги
о поверхность земли. Анализ модели десятого порядка приведением
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 1
63


