min
ξ
1
2
[
−
0
,
16
,
0
,
16]
F
(
ξ
1
) =
F
(
ξ
1
)
≈ −
168
,
5
,
−
F
(
ξ
1
)
δ
2
≈
258
,
8
,
и условие (47) выполняется. Следовательно, при выбранных числовых
параметрах задачи найденное значение
ξ
−
2
соответствует периодиче-
скому движению робота по лестнице.
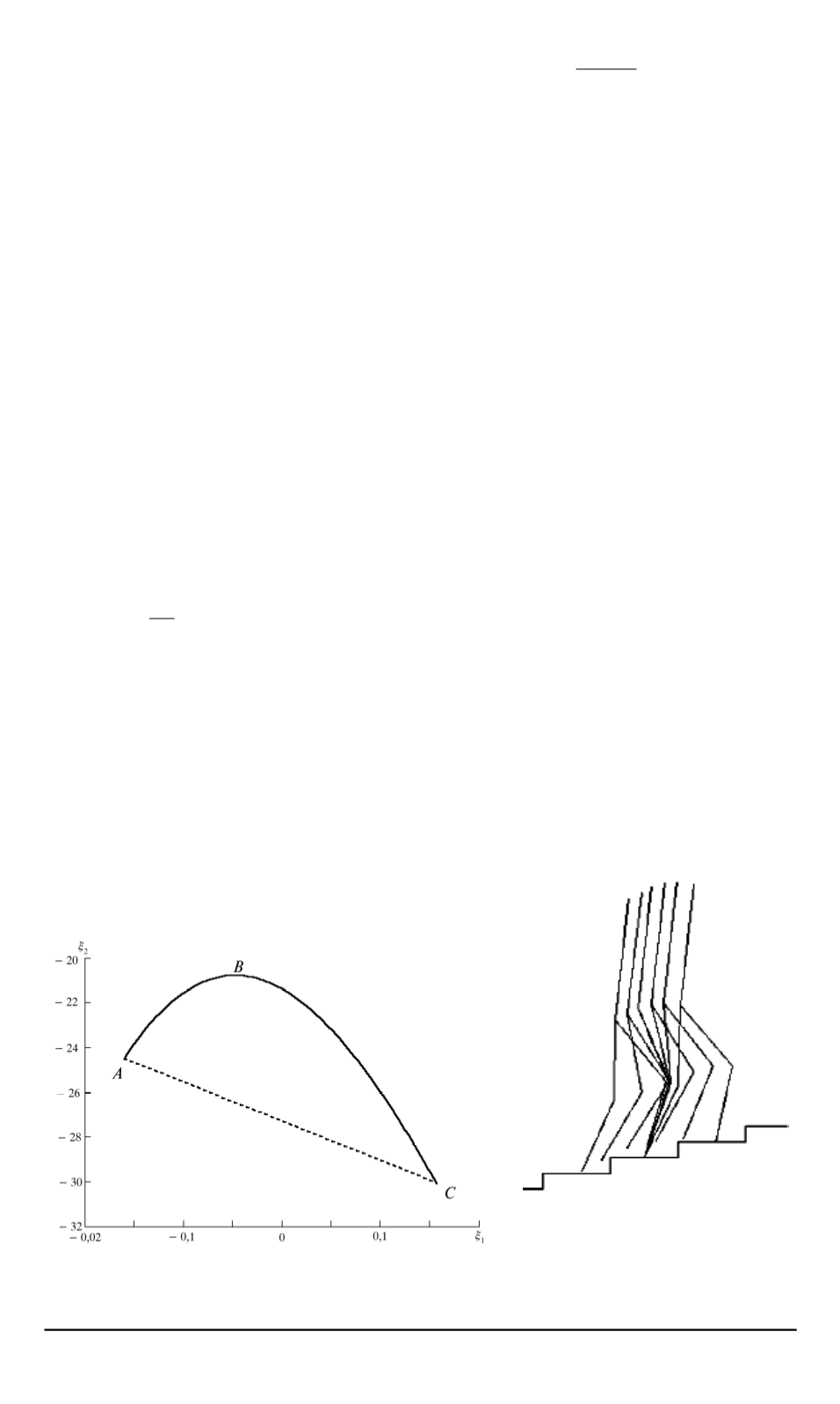
Соответствующее решение системы (37) совместно с соотношени-
ем (43) изобразим в виде кривой на плоскости
ξ
1
, ξ
2
(рис. 3).
Точка
A
соответствует состоянию робота в момент после удара. На
фазе одноопорного движения изменение переменных
ξ
1
,
ξ
2
описывает-
ся дугой
ABC
, причем координаты точки
C
совпадают со значениями
ξ
1
и
ξ
2
в момент перед ударом. Отрезок
CA
, показанный на рис. 3 пунк-
тиром, соответствует фазе перехода робота с одной ноги на другую.
При этом переменная
ξ
1
скачком меняет свое значение от
ξ
−
1
= 0
,
16
м
до
ξ
+
1
=
−
0
,
16
м, а
ξ
2
меняется в соответствии с соотношением (43).
Таким образом, вектор состояния робота в момент перед ударом,
обеспечивающий периодическое движение по лестнице, существует и
имеет вид
x
−
=
−
π
30
,
3
,
85
,
3
,
12
,
2
,
89
,
2
,
75
,
0
,
0
,
19
,
−
1
,
07
,
2
,
37
,
−
1
,
48
т
.
Чтобы построить само периодическое движение, необходимо ре-
шать систему
˙
x
=
f
cl
(
x
)
,
x
(0) = Δ(
x
−
)
до выполнения условий
Z
1
(
q
) =
l
Z
,
X
1
(
q
)
> X
Q
(
q
)
, означающих окончание фазы одноопорно-
го движения. Непосредственные вычисления показывают, что для вы-
бранных значений параметров это условие выполняется при
t
= 0
,
38
с.
Изобразим на рис. 4 последовательные положения робота на фазе
Рис. 3. Периодическое движение по лестнице
при ограничениях нулевой динамики
Рис. 4. Последовательность
состояний робота при пе-
риодическом движении по
лестнице
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 1
59


