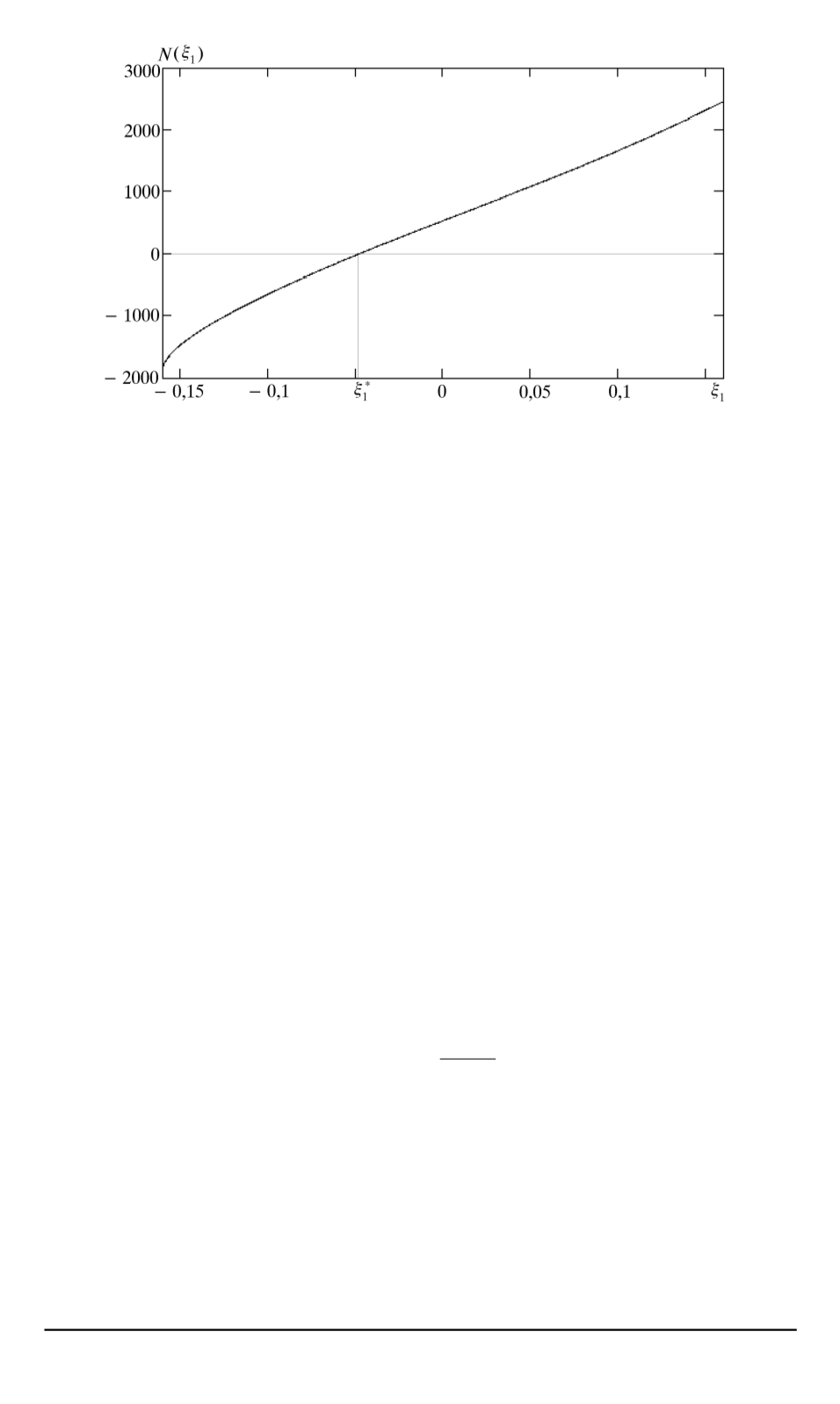
Рис. 2. Решение уравнения
N
(
ξ
1
) = 0
Проверим, существует ли в этом случае периодическое движение,
и, если существует, определим состояние робота в момент перед уда-
ром. Для этого проведем анализ системы уравнений нулевой дина-
мики.
При выбранных числовых параметрах решение системы уравне-
ний (40) дает следующие значения переменных
q
i
,
i
= 1
,
31
,
32
,
41
,
42
,
в момент перед ударом при наличии ограничений нулевой динамики:
ˆ
q
−
1
=
−
π/
30
,
ˆ
q
−
31
= 3
,
85
,
ˆ
q
−
32
= 3
,
12
,
ˆ
q
−
41
= 2
,
89
,
ˆ
q
−
42
= 2
,
75
.
Условие наступления фазы перехода в координатах
ξ
1
,
ξ
2
примет вид
ξ
−
1
= 0
,
16
м. Значение переменной
ξ
1
в момент после удара равно
−
0
,
16
м. Величина
δ
, задающая скачок переменной
ξ
2
на фазе перехо-
да, равна
0
,
81
.
Согласно формуле (46) имеем
(
ξ
−
2
)
2
= 922
,
36
. Значение
ξ
−
2
прини-
маем равным
−
30
,
4
, так как
α
(0
,
16) =
−
0
,
032
<
0
.
Убедимся, что найденное значение
ξ
−
2
задает периодическое дви-
жение. Для этого проверим выполнение условия (47). Как видно из
графика, приведенного на рис. 2, функция
N
(
ξ
1
) =
β
(
ξ
1
)
α
(
ξ
1
)
на отрезке
[
−
0
,
16
,
0
,
16]
монотонно возрастает и имеет единственный
нуль
ξ
1
, соответствующий точке минимума функции
F
(
ξ
1
)
.
Численное решение уравнения
N
(
ξ
1
) = 0
на отрезке
[
−
0
,
16
,
0
,
16]
дает следующий результат:
ξ
1
≈ −
0
,
048
.
Соответственно, имеем
58
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 1


