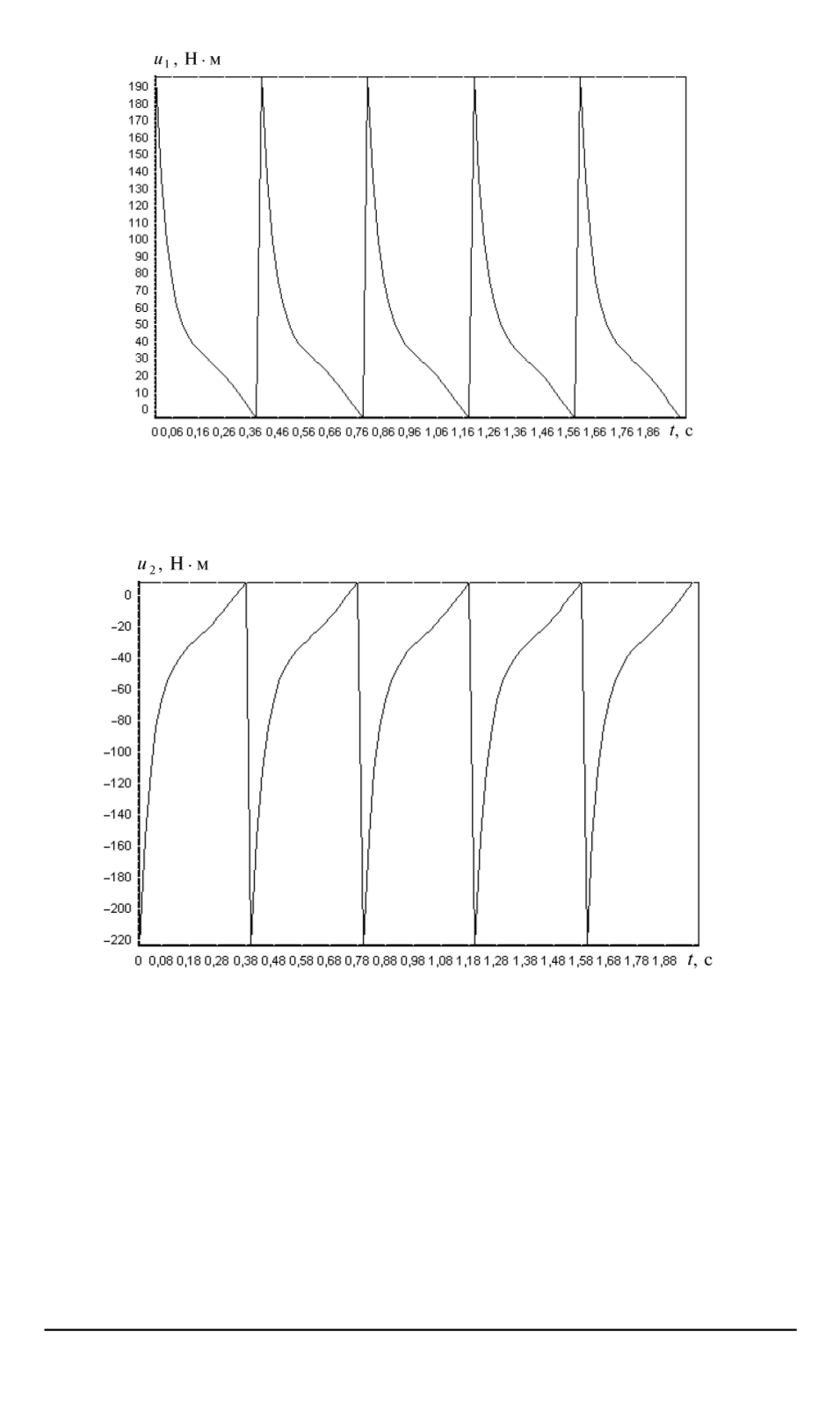
Рис. 9. Изменение управления
u
1
(
t
)
в пределах пяти шагов
Рис. 10. Изменение управления
u
2
(
t
)
в пределах пяти шагов
изменяется скачком. Это связано с переменой роли ног:
Z
H
измеря-
ется относительно положения конца опорной ноги, а на следующем
шаге опорной становится нога, которая на предыдущем шаге была
переносимой.
Конец переносимой ноги в начальный момент времени находит-
ся на предыдущей ступени, поэтому
Z
1
(0) =
−
l
Z
=
−
0
,
08
м (рис. 8).
С течением времени
Z
1
возрастает, пока не достигает при
t
= 0
,
28
с
максимального значения, равного
0
,
096
м. До окончания фазы одно-
62
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2006. № 1


