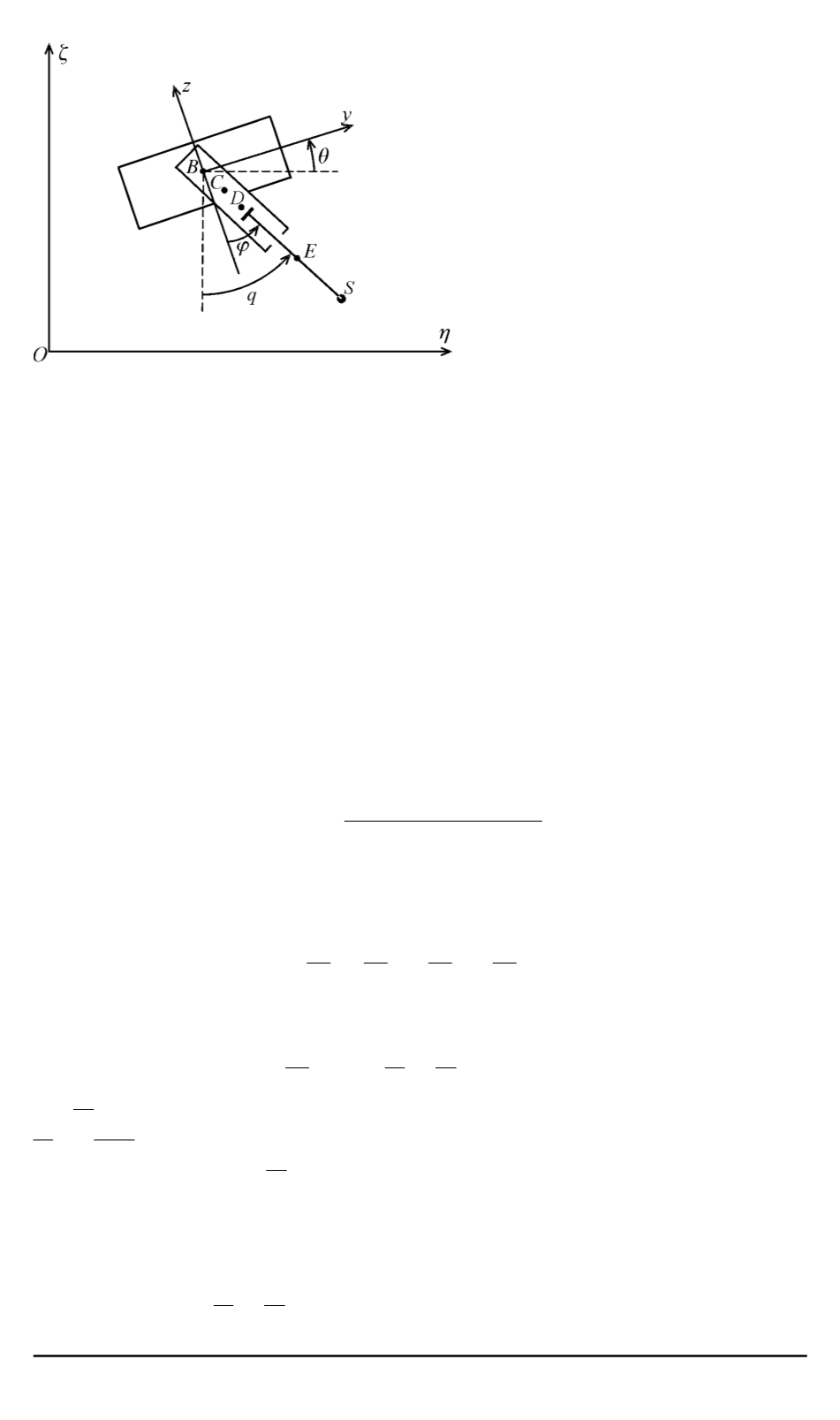
Рис. 1. Конструктивная схема аппарата
соответственно массу корпу-
са, цилиндра и штока ноги
и их моменты инерции от-
носительно их центров масс.
Положение корпуса в абсо-
лютной системе координат
Oηζ
определяется координа-
тами центра масс корпуса и
углом наклона корпуса к го-
ризонту
θ
. Система коорди-
нат
Byz
связана с корпус-
ом аппарата, ось
Bz
является
конструктивной вертикалью,
а ось
By
— продольной осью аппарата. Положение ноги относительно
корпуса определяется углом
ϕ
между продолжением оси
Bz
и теле-
скопическим звеном ноги и длиной ноги
l
=
BS
. Угол
q
определяет
ориентацию телескопического звена ноги в абсолютном пространстве
q
=
θ
+
ϕ.
(1)
Центр масс цилиндра
D
лежит на оси телескопического звена ноги
на расстоянии
r
2
=
BD
от точки подвеса ноги к корпусу. Центр масс
штока
E
лежит на оси телескопического звена ноги на расстоянии
r
3
=
SE
от стопы
S
. Центр масс аппарата
C
лежит на оси телеско-
пического звена ноги на расстоянии
R
=
BC
от точки подвеса ноги к
корпусу:
R
=
m
2
r
2
+
m
3
(
l
−
r
3
)
m
1
+
m
2
+
m
3
.
(2)
В фазе полета имеет место закон сохранения кинетического момен-
та относительно центра масс аппарата. Кинетический момент аппарата
складывается из кинетического момента корпуса, цилиндра и штока:
K
=
K
1
+
K
2
+
K
3
.
Кинетический момент корпуса относительно центра масс аппарата
С
равен
K
1
=
m
1
R
×
V
B
+
J
1
˙
θ
ˉ
i,
где
V
B
— скорость центра масс корпуса относительно осей Кенига [7],
R
=
BC
,
ˉ
i
— орт оси
Oξ
, которая перпендикулярна плоскости
Oηζ
на рис. 1. Скорость
V
B
складывается из двух компонент: радиаль-
ной, направленной вдоль телескопического звена ноги и равной
˙
R
, и
тангенциальной, направленной перпендикулярно к телескопическому
звену ноги и равной
R
˙
q
. Тогда
R
×
V
B
=
R
2
˙
q, K
1
=
m
1
R
2
˙
q
+
J
1
˙
θ.
56
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2011. № 1


