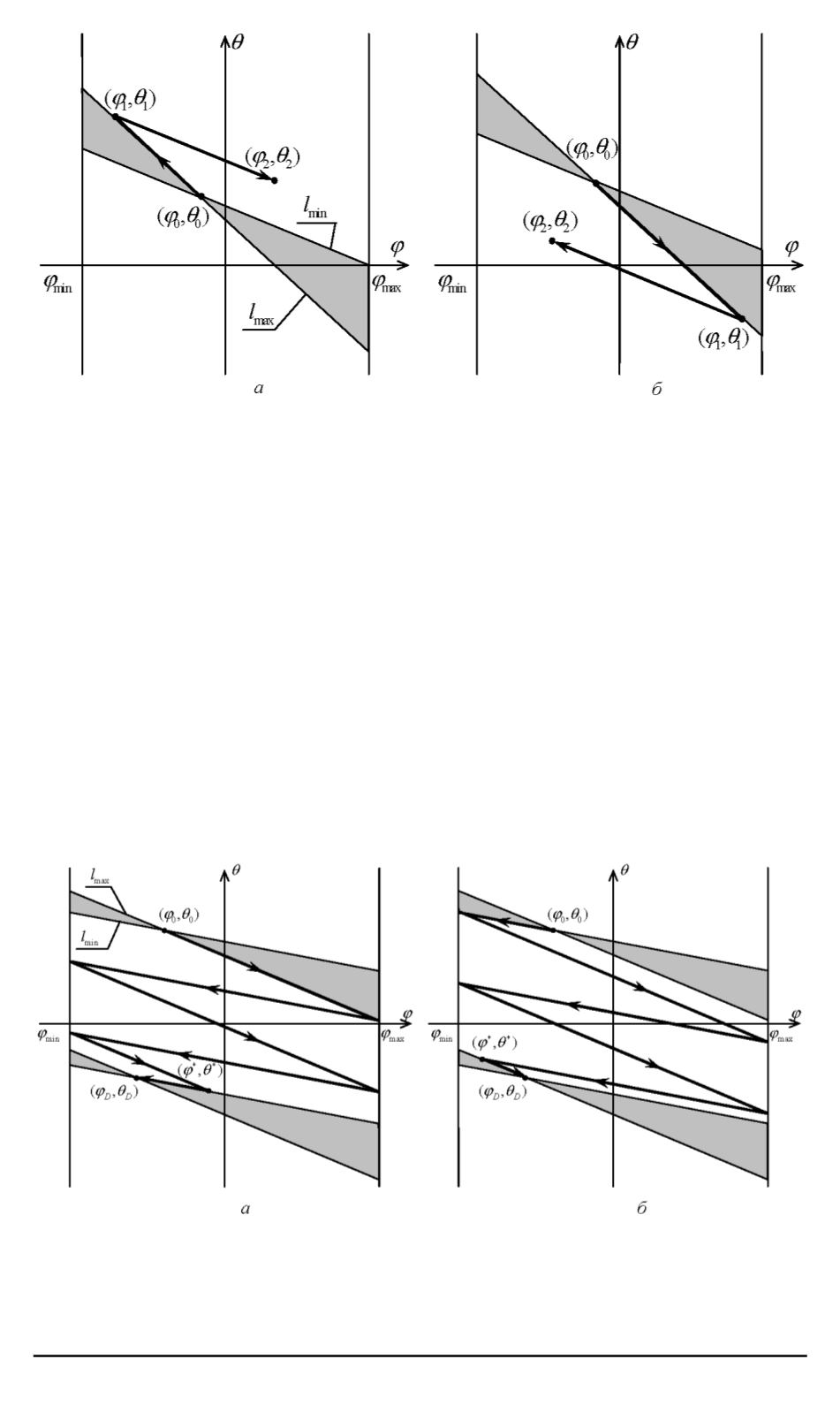
Рис. 5. Траектория движения изображающей точки при переходе в точку
(
ϕ
2
, θ
2
), не лежащую в области достижимости из начального положения (
ϕ
0
, θ
0
)
Вместо
l
min
и
l
max
могут использоваться другие значения
l
2
2
[
l
min
, l
max
]
. Поворот корпуса может быть осуществлен на любой
угол
Δ
θ
при повторе описанных движений. Поэтому можно постро-
ить программное движение разворота аппарата во всех случаях, когда
точка (
ϕ
D
, θ
D
) лежит вне области достижимости из начального поло-
жения.
Когда (
ϕ
D
, θ
D
) не лежит в области достижимости из начального
положения, существует два способа построения программного дви-
жения. Если
θ
D
< θ
0
, первому способу соответствует движение изо-
бражающей точки на плоскости
ϕ, θ
по траектории, показанной на
рис. 6,
а
. Программное движение реализуется следующим образом:
Рис. 6. Траектории движения изображающей точки для случая, когда конечное
положение (
ϕ
D
, θ
D
) лежит вне области достижимости из начального положения
(
ϕ
0
> ϕ
D
), при первом (
а
) и втором (
б
) способах построения программного
движения
60
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2011. № 1


