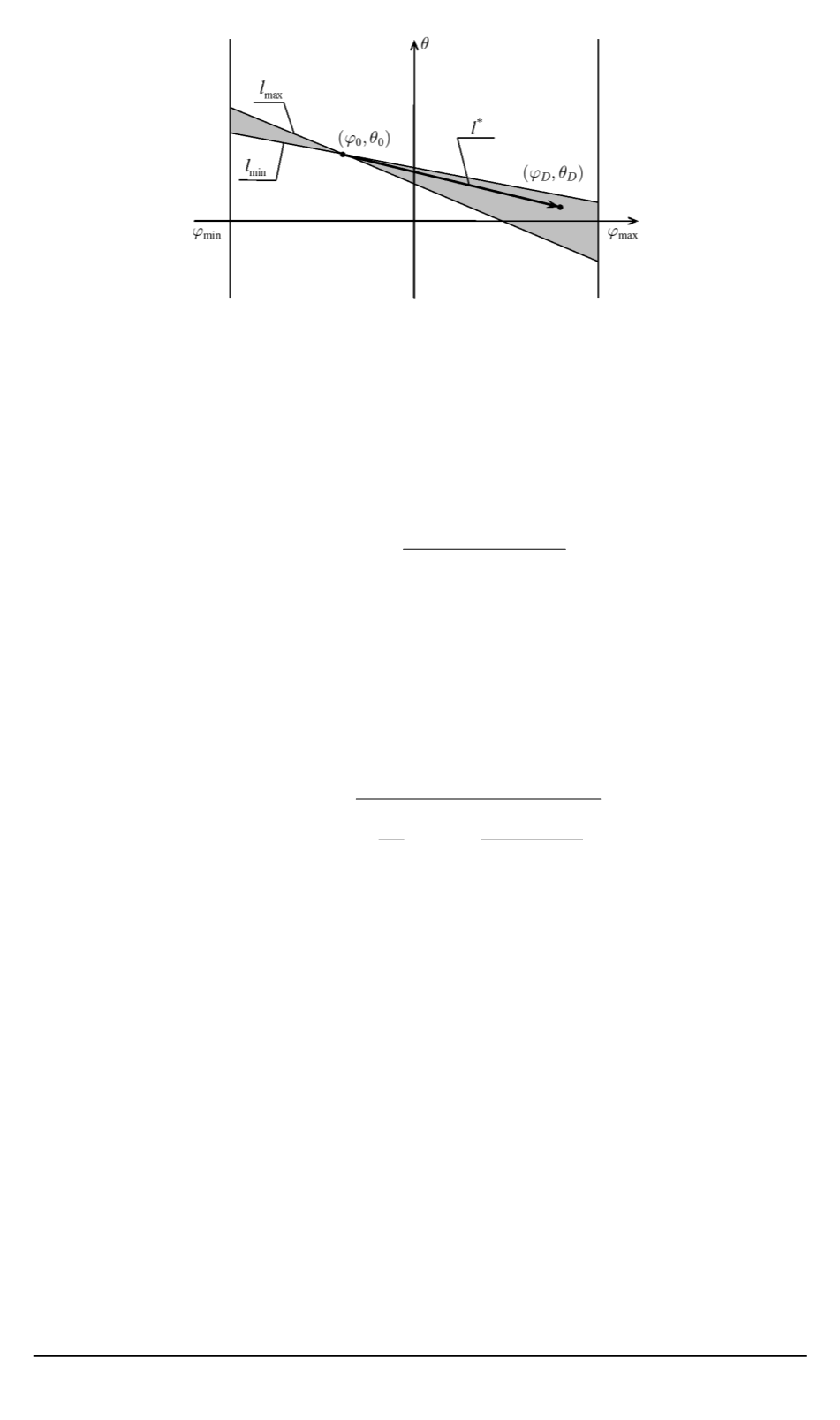
Рис. 4. Траектория движения изображающей точки в том случае, когда
конечное положение (
ϕ
D
, θ
D
) лежит в области достижимости из начального
положения (
ϕ
0
, θ
0
)
Пусть задано начальное положение аппарата относительно центра
масс (
ϕ
0
, θ
0
, l
0
) и требуемое конечное (
ϕ
D
, θ
D
, l
D
). Если точка (
ϕ
D
, θ
D
)
лежит в области достижимости точки (
ϕ
0
, θ
0
) (рис. 4), то в силу (8)
θ
D
−
θ
0
=
−
k
(
l
)(
ϕ
D
−
ϕ
0
)
k
(
l
) +
J
1
,
(9)
где
l
2
[
l
min
, l
max
]
. В этом случае алгоритм разворота реализуется так:
при
ϕ
=
ϕ
0
длина ноги изменяется до значения
l
;
при фиксированном
l
=
l
нога аппарата поворачивается, угол
ϕ
изменяется до
ϕ
D
, угол поворота корпуса
θ
становится равным
θ
D
;
при
ϕ
=
ϕ
D
длина ноги изменяется до требуемого значения
l
D
.
В силу (4) и (9)
l
=
λ
+
s
−
1
μ
1
μ
2
+
J
1
Δ
θ
Δ
θ
+ Δ
ϕ
,
(10)
где
Δ
ϕ
=
ϕ
D
−
ϕ
0
,
Δ
θ
=
θ
D
−
θ
0
.
Аппарат можно перевести в точку (
ϕ
2
, θ
2
), заведомо не лежащую
в области достижимости из начального положения (
ϕ
0
, θ
0
). Например,
движение осуществляется следующим образом:
1) при
ϕ
=
ϕ
0
длина ноги изменяется от
l
0
до
l
max
;
2) нога аппарата поворачивается на угол
Δ
ϕ
1
=
ϕ
1
−
ϕ
0
(
ϕ
1
2
2
[
ϕ
min
, ϕ
max
])
, угол поворота корпуса
θ
становится равным
θ
1
;
3) при
ϕ
=
ϕ
1
длина ноги изменяется от
l
max
до
l
min
;
4) нога аппарата поворачивается на угол
Δ
ϕ
2
=
ϕ
2
−
ϕ
1
(
ϕ
2
2
2
[
ϕ
min
, ϕ
max
]
,
sign(Δ
ϕ
2
) =
−
sign(Δ
ϕ
1
))
, угол поворота корпуса
θ
становится равным
θ
2
;
5) при
ϕ
=
ϕ
2
длина ноги изменяется от
l
min
до
l
0
.
Траектория движения изображающей точки на плоскости перемен-
ных
ϕ, θ
показана на рис. 5 в случае
ϕ
1
< ϕ
0
(
а
) и
ϕ
1
> ϕ
0
(
б
).
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2011. № 1
59


