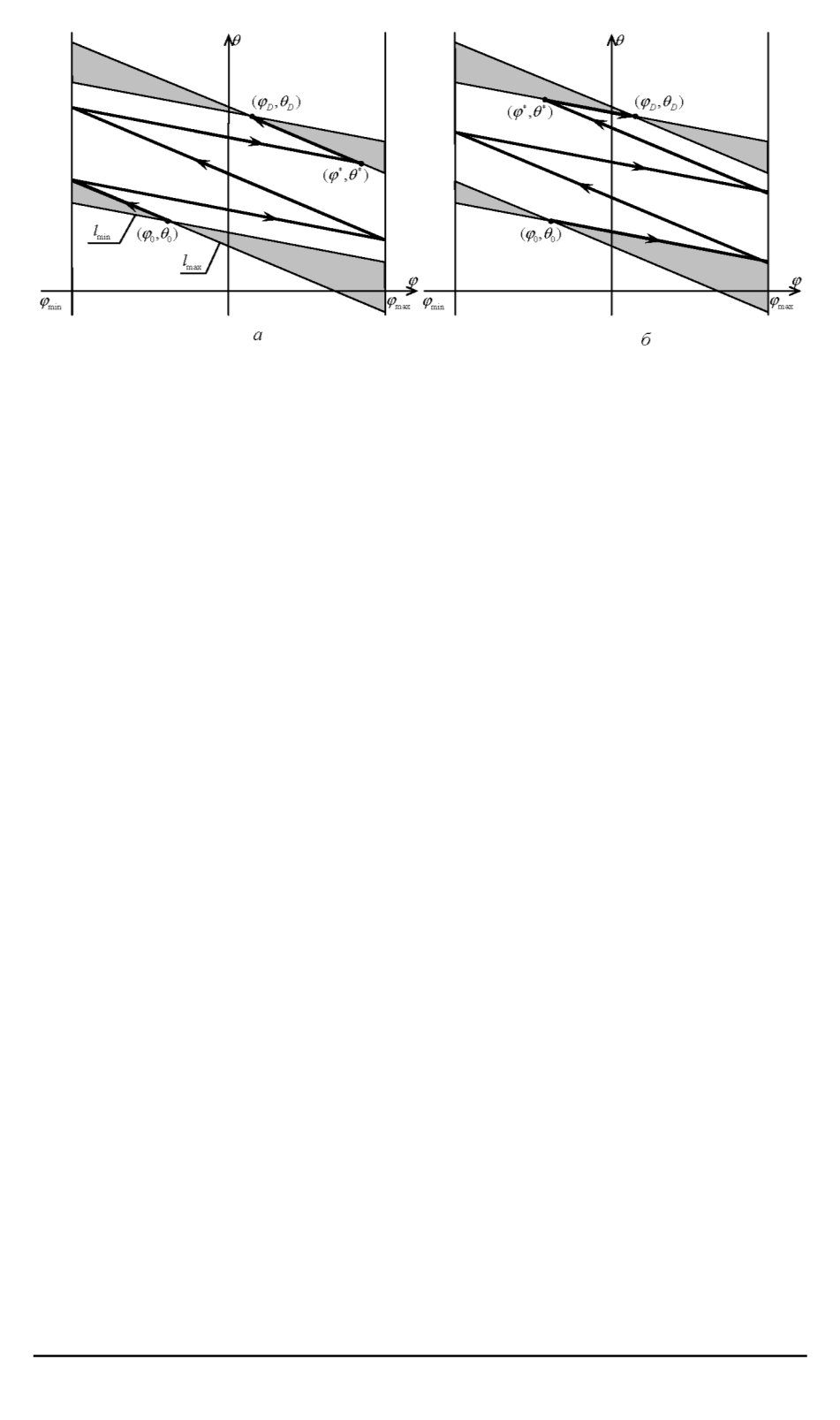
Рис. 7. Траектории движения изображающей точки для случая, когда конечное
положение (
ϕ
D
, θ
D
) лежит вне области достижимости из начального положения
(
ϕ
0
< ϕ
D
), при первом (
а
) и втором (
б
) способах построения программного
движения
объединить однотипные пункты 1–3, 4–6, 7–9 описания алгоритма по-
строения программного движения.
Утверждение 2.
Выбор способа построения программного движе-
ния не влияет на сумму движений по углу
ϕ
.
Доказательство
. Пусть изображающая точка (см. рис. 9) движет-
ся из точки
А
в
В
. При первом способе построения программного
движения получаем путь точки
ADFB
, а при втором —
ACGB
. Со-
вокупность движений по углу
ϕ
— это путь, пройденный проекцией
изображающей точки на ось
ϕ
. Имеем
ADFB
=
AD
+
DF
+
FB
,
ACGB
=
АС
+
CG
+
GB
. Четырехугольники
ECAD
и
BFEG
— па-
раллелограммы, их стороны попарно параллельны и равны; получаем
СА
=
ED
,
CE
=
AD
,
FB
=
EG
,
FE
=
BG
, тогда
AD
+
FB
=
CG
,
FD
=
СА
+
BG
.
Пути, пройденные изображающей точкой на плоскости
ϕ, θ
для
первого и второго способов движения равны:
ADFB
=
ACGB
. Сле-
довательно, суммы движений аппарата по углу
ϕ
также одинаковы.
Назовем
точкой переключения
ту точку на плоскости переменных
ϕ, θ
, в которой изменяется длина ноги аппарата.
Утверждение 3.
В зависимости от конечного положения аппарата
выбор способа построения программного движения может влиять на
сумму движений по координате
l
.
На сумму движений по координате
l
влияет число точек переключе-
ния на траектории изображающей точки. На рис. 10 заштрихованные
области и части их границ, обведенные жирной линией, соответствуют
конечным положениям аппарата, для которых число точек переключе-
ния зависит от способа построения программного движения и разли-
чается на 1 (например, точки
А
и
B
). Для всех остальных конечных
62
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2011. № 1


