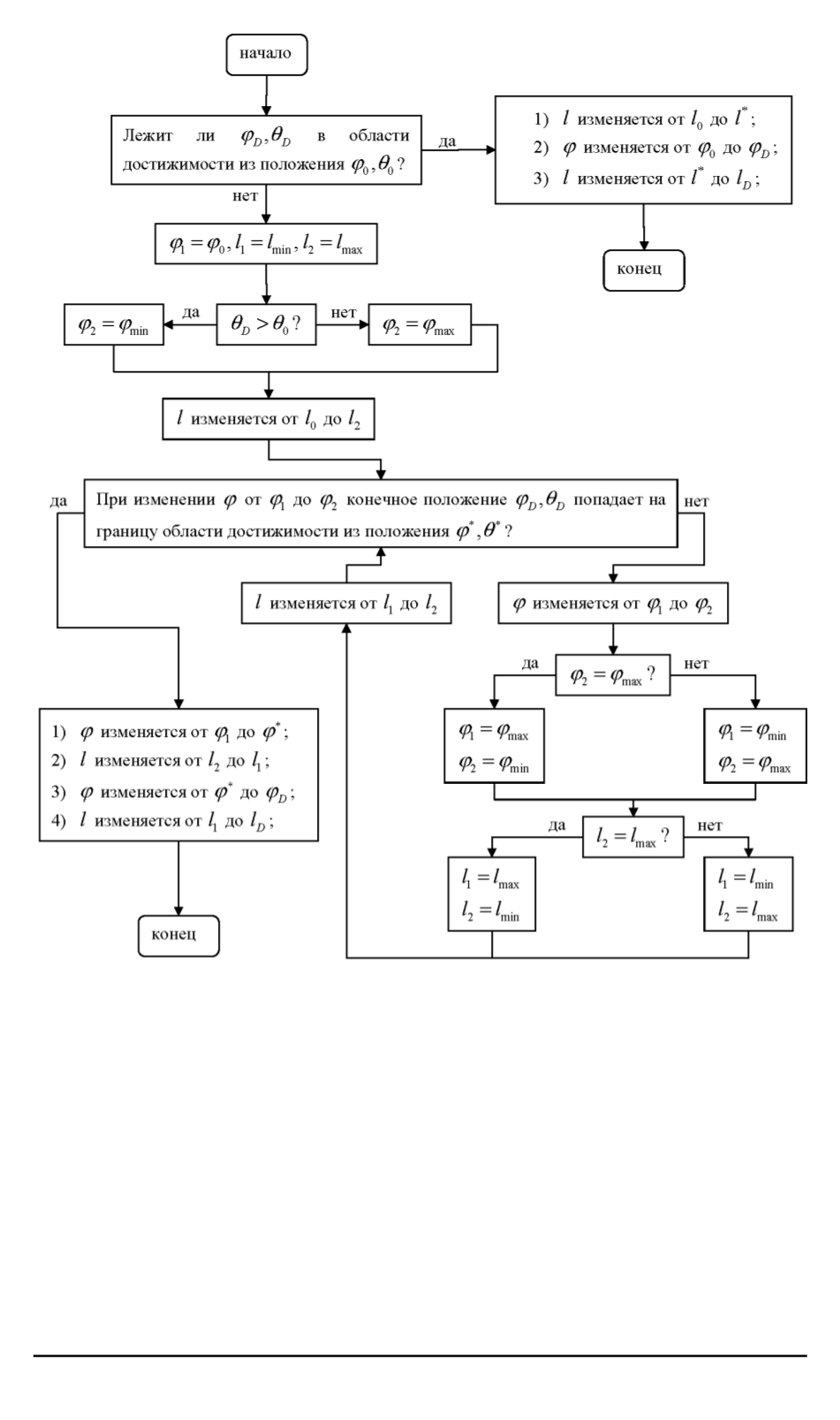
Рис. 8. Блок-схема алгоритма построения программного движения (первый спо-
соб)
положений способ движения не влияет на число точек переключе-
ния (например, точки
С
и
D
). Это легко подтверждается построением
траекторий изображающей точки на плоскости
ϕ, θ
.
Утверждение 4.
При изменении ограничений на значения угла
ϕ
сумма движений по углу
ϕ
остается постоянной, а по координате
l
—
изменяется.
Доказательство
. Рассмотрим два случая (рис. 11) — когда движе-
ние точки по координате
ϕ
ограничено (
ϕ
2
[
ϕ
min
, ϕ
max
])
и когда
ограничений нет. В первом случае траектория точки
ADCHGB
, во
втором —
ADEFB
. Имеем
ADCHGB
=
AD
+
DC
+
CH
+
HG
+
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2011. № 1
63


