Модель движения мобильного робота.
Рассмотрим четырехко-
лесный мобильный робот с автомобильной компоновкой колес. Пе-
редние колеса управляющие, задние — ведущие.
При построении модели движения предположим, что робот пере-
мещается в горизонтальной плоскости, а эффекты, связанные с дина-
мическим перераспределением нагрузки на колеса при маневрирова-
нии, динамикой робота в вертикальной плоскости и рельефом поверх-
ности, не учитываются. Корпус робота рассматривается как абсолютно
твердое тело.
Используем модель качения колеса с деформируемой периферией,
описывающей только эффект поперечного псевдоскольжения (попе-
речного увода) колеса (см., например, [2]).
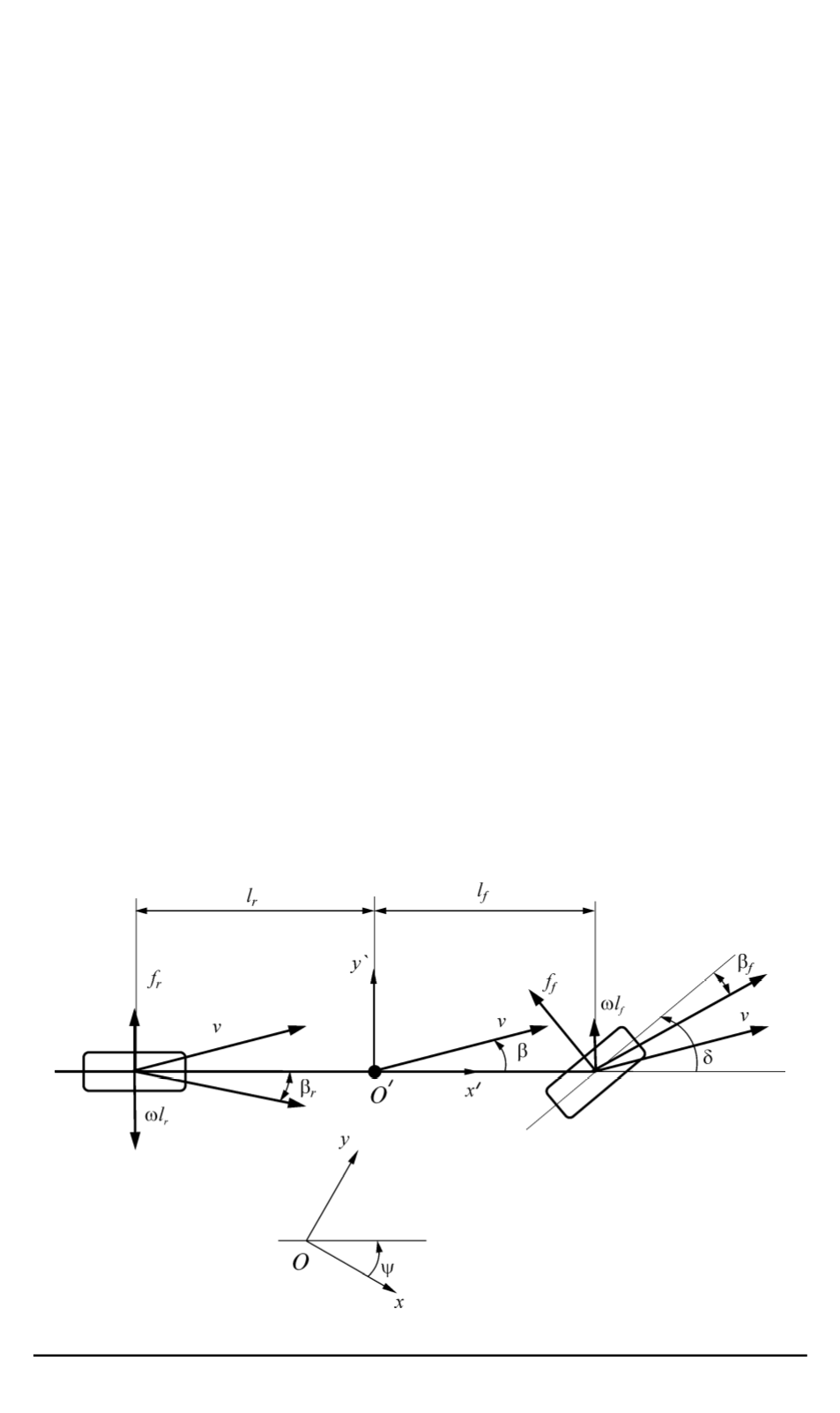
Даже при принятых предположениях модель движения четырехко-
лесного робота оказывается достаточно сложной. Дальнейшее упро-
щение связано с переходом к так называемой “велосипедной” модели,
расчетная схема которой приведена на рис. 1.
Свяжем с роботом строительную систему координат
x
0
O
0
y
0
, начало
которой совпадает с центром масс робота, а ось
x
0
направлена вдоль
продольной оси симметрии. Положение мобильного робота как твер-
дого тела на плоскости однозначно определяется двумя координатами
центра масс
O
0
в неподвижной системе координат
xOy
и углом пово-
рота оси
O
0
x
0
строительной системы координат относительно оси
Ox
неподвижной системы координат.
Пусть
m
— масса мобильного робота;
J
— момент инерции робота
относительно вертикальной оси, проходящей через центр масс;
l
f
и
Рис. 1. “Велосипедная” модель мобильного робота
34
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2008. № 2


