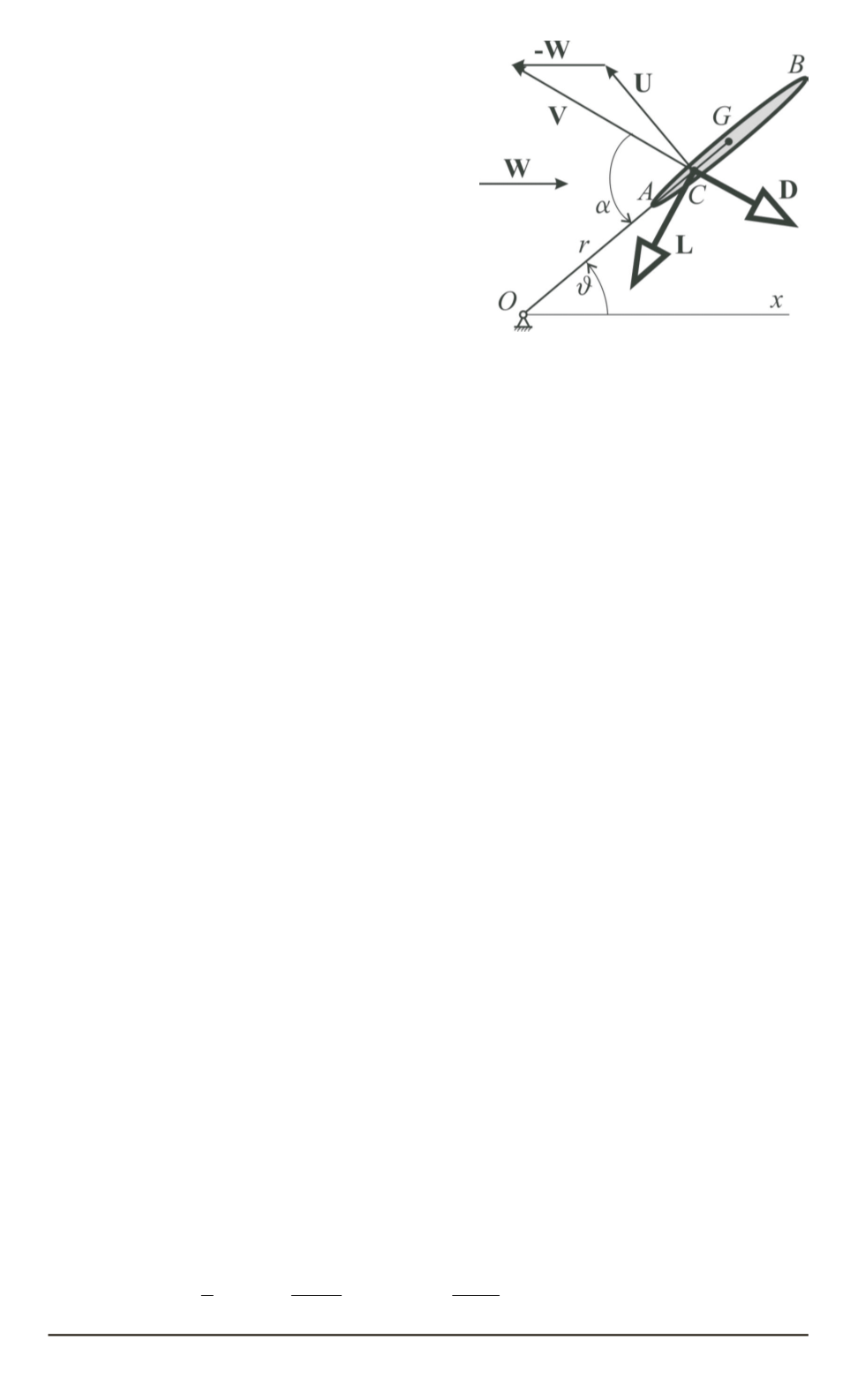
Рис. 9. Поперечное сечение аэро-
динамического маятника плоско-
стью качания
среднем траектория точки
G
стано-
вится все более горизонтальной, хотя
“размах” колебаний около этого сред-
него движения не изменяется. Посто-
янство размаха хорошо согласуется с
тем, что при отсутствии силы тяжести
в данных условиях точка
G
перемеща-
лась бы по одной и той же окружно-
сти независимо от значения силы тя-
ги. Однако с увеличением этой силы
возрастает скорость движения вдоль
петли (периодическая траектория
R
+
“поднимается” на фазовой плоскости
v, θ
). В связи с этим увеличивается и
частота петель, что отражено на рис. 8. Более подробный параметри-
ческий анализ приведен в работе [10].
Задача об аэродинамическом маятнике (флюгере).
Рассмотрим
поведение колебательной системы с одной степенью свободы — аэ-
родинамического маятника [11]. Такой маятник представляет собой
тонкую плоскую пластинку, жестко закрепленную вдоль державки.
Вся конструкция находится в стационарном воздушном потоке со ско-
ростью
W
. Поперечное сечение такого аэродинамического маятника
плоскостью качания представлено на рис. 9. Пластинка
АВ
шириной
2
b
закреплена геометрическим центром
G
на державке
OG
и может
вращаться вместе с державкой как одно целое вокруг оси, перпендику-
лярной плоскости чертежа и проходящей через точку
О
. Пренебрегая
взаимодействием державки с потоком и трением в оси качания, будем
учитывать лишь аэродинамическое воздействие, оказываемое потоком
среды на пластинку.
Примем, что в каждый момент времени сила воздействия среды
R
полностью определяется мгновенными значениями скорости
V
и
угла атаки
α
. Вектор абсолютной скорости движения центра давления
равен
U
=
W
+
V
, причем
|
U
|
=
U
= (
r
−
ε
(
α
)) ˙
ϑ
, где
r
— длина дер-
жавки;
ϑ
— угол поворота державки;
ε
(
α
)
— сдвиг центра давления
C
,
отсчитываемый от геометрического центра
G
.
Поведение такого маятника можно описать следующими уравне-
ниями [11]:
˙
ϑ
=
ω,
˙
ω
=
−
q
(
α
)(
l
−
e
(
α
))
v
2
;
(8)
v
sin
α
= sin
ϑ
+ (
l
−
e
(
α
))
ω, v
cos
α
= cos
ϑ.
(9)
Здесь введены безразмерные параметры и переменные:
l
=
r
b
;
k
=
b
3
ρS
2
J
;
e
(
α
) =
ε
(
α
)
b
;
q
(
α
) =
kC
N
(
α
);
ISSN 1812-3368. Вестник МГТУ им. Н.Э. Баумана. Сер. “Естественные науки”. 2014. № 2
43


